3D打印的青蛙脚:改善软组织的抓握不足问题
尽管医疗行业在外科技术领域取得了令人印象深刻的进展,但医生们仍然在努力解决一个根本性问题:软组织抓握。作为微创手术中的一个持续性问题,我们目前使用的具有高夹捏力的笨重抓握器械来操纵软组织的模型不会滑倒。但这些工具有很多不足之处,完全依靠外科医生手中的稳定性才能获得成功。但是,由于一个雄心勃勃的工程专业学生和一些3D打印技术,可能很快就要改变了。

Tim van Broekhoven是荷兰Delt科技大学(TU Delft)最近毕业的学生,也是软组织抓握技术革新新思路背后的精英人才。 van Broekhoven的工程硕士论文试图克服目前操作手术中软组织的问题。虽然这个问题本身并不是什么新鲜事,但工程专业学生转而寻求灵感的地方至少是创新的。

van Broekhoven在他的摘要中解释道:“在本质上,有几种动物使用粘附力,以便抓牢,不仅是坚硬的,而且是柔软的基质。 在这些动物中,由于壁虎和树蛙的体重很大,因此壁虎和树蛙对设计抓握系统特别感兴趣。”代尔夫特大学的毕业生继续描述壁虎和树蛙的脚趾垫在这里特别相关,主要的手段,通过这些生物坐下来,爬上,并跳过他们的环境不滑倒。这些脚趾垫的内部工作原理呈现出最好的自然演化:以微观层次的柱状结构为特征,柔软的脚趾垫也具有坚硬的内部纤维网络;所有这一切都有助于增强动物脚和外表面之间的摩擦力或抓地力。也许最令人兴奋的是,这种结构可以被模仿,促进人为的方式来实现这些微小的生物展示粘性抓地力。

van Broekhoven在他的题为“模仿壁虎和树蛙粘着软基材的论文”中,通过3D打印的方式继续研究这一机制。他写道,他的基本目标是研究用刚性纤维加强软垫是否会增加软质基材的摩擦,而不是使用无纤维的软垫。为了检验他的假设, van Broekhoven进行了三个独立的实验。在第一个实验中,他创造了一种专门的聚二甲基硅氧烷(PDMS)垫,其包封3D打印纤维以测试复合材料的粘附力和摩擦力。在实验2中,在类似的PDMS垫中使用更硬的3D打印纤维。最后,在最后的实验中,van Broekhoven在PDMS垫中使用了碳纤维织物。在所有三个实验中,不同硬度的硬和软明胶基材都起作用,软明胶用作人体软组织的“幻影”。

结果表明,无论衬底类型如何,向PDMS衬垫添加具有不同程度硬度的3D打印纤维都降低了峰值摩擦力。另一方面,与没有纤维的PDMS垫相比,碳纤维织物显着增加峰值摩擦力。总而言之,van Broekhoven总结说,这项研究的结果是“有希望发展纤维增强复合材料,可以抓住软基材,包括软组织抓握的微创抓取器械”。
中国3D打印网译自:3ders.org 转载请注明出处!
(责任编辑:admin)

 大西洋大学开发用于食道癌
大西洋大学开发用于食道癌 Ashley Furniture在制造过
Ashley Furniture在制造过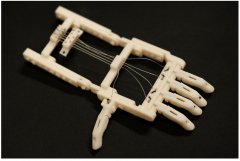 看美国研究人员如何继续改
看美国研究人员如何继续改 ITAMCO和普渡大学合作为美
ITAMCO和普渡大学合作为美 汉高收购美国一3D打印公司
汉高收购美国一3D打印公司 加拿大卫生部发布医疗设备
加拿大卫生部发布医疗设备

