uCRobotics机器人十年沉浮录
时间:2018-06-13 11:58 来源:威控睿博 作者:中国3D打印网 阅读:次
在uCRobotics公司成立之初前2年,即2008年,从美国引入了SRV-1 & SVS机器人,自此便与机器人结下了很深的渊源。公司最初主要经营业务是做uCLinux嵌入式系统研发,在时任技术主管张大胖子(后来创建了uCRobotics公司)的强烈要求下引进了该产品,但也只是作为辅助业务。在当时机器人概念尚不属于爆款的年代,该产品以小巧智能的特性曾经风靡欧美各大高校,引入国内后也大受欢迎,一度曾卖到16000元/台。
2年后,随着原公司业务方向的调整,于是成立了uCRobotics公司,主营机器人相关的产品和技术研发。下面简要介绍一下这些年折腾的过各种机器人产品。
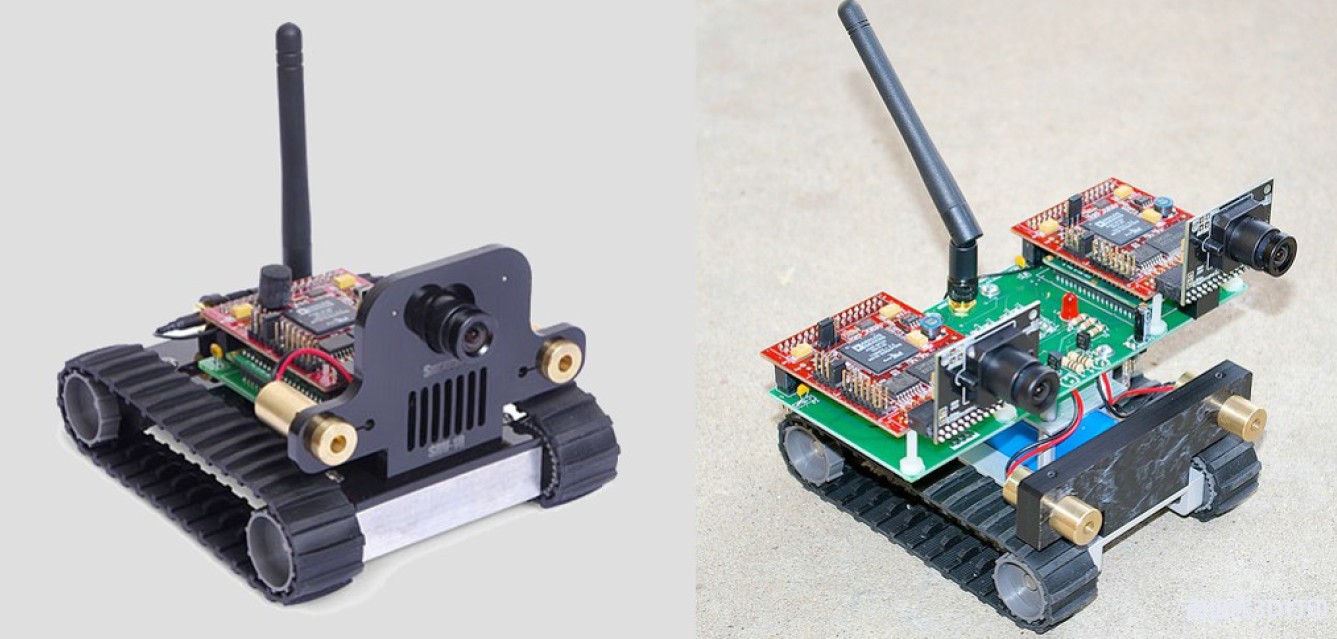
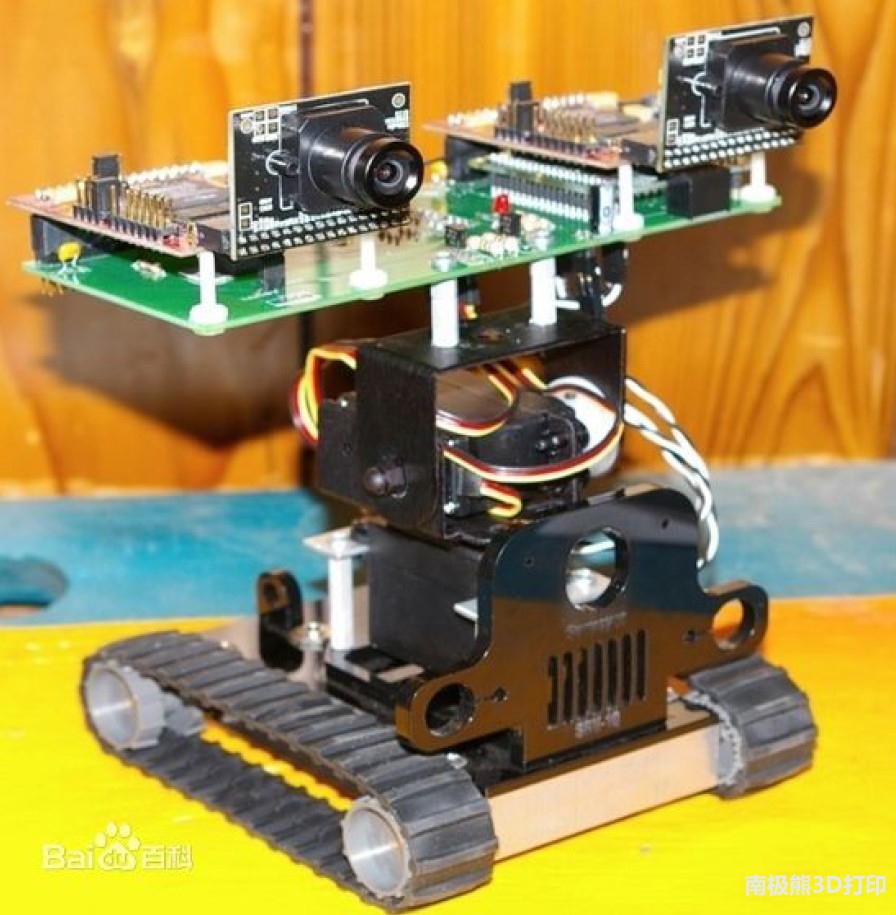
一、SRV-1履带式机器人 & SVS双目机器人
产品特点:
• 体积小巧,只有手掌大小;
• 带有摄像头,其中SVS是双目的,可以实现立体成像(那个年代,还大多停留在单片机巡线机器人、灭火机器人水平,复杂的应用场景需要一个大个机体背着一个笔记本电脑进行数据处理,鲜有自带视觉的机器人产品);
• 功能丰富,内置上百个交互指令;
• 软硬件开放,用户可添加自己的模块和控制指令;
• 内置解释器,可以实现自主运动和控制;
• 无线遥控,带有无线wif模块;
• 支持第三方控制编程软件RoboRealm;
• 丰富的客户端软件支持,Java/Python客户端,iOS客户端,Android客户端,NDSL客户端等,其中后面三种移动客户端都是引入到国内后我们自己添加的。
核心参数:
• 处理器:500MHz 的 ADI Blackfn BF537(1000 mips), 32MB SDRAM, 4MB SPI Flash
• 摄像头:Omnivision OV7725, 30 万像素
• 驱动:双路直流齿轮电机
• 规格:120mm 长 x 100mm 宽 x 80mm 高
• 重量:约 350 克(SVS双目版本约500克)
• 电源:7.2V 2Ah 锂电池,使用时间大约 4 小时
根据应用场景的需求,还可以增加云台结构,实现视觉的180°旋转;除此之外,还可以增加对GPS等传感器模块的支持。
如果需要外壳,我们后来还提供了3D打印外壳的服务:

当时的官方论坛支持的非常好,文档也很丰富,再加上产品的系统固件也一直获得持续的更新升级,所以用户非常广泛,尤其是创客文化非常普及的欧美,几乎所有的高校都是该产品的用户。当然国内的市场表现也是一片大好。
该产品还上了美国CNN栏目。
然而天有不测风云,2011年该产品的核心创始人不幸离世了,该公司也面临解散。虽然此时我们完全可以在国内制造该产品,但官方的支持减弱了(论坛勉强又运维了2年左右也彻底关闭了),系统升级也中断了,所以产品的生命力也就此结束了。除此之外,机器人在那个年代还属于非常小众的产品,再加上技术上的约束,一时还找不到进一步的突破点。
鉴于此,公司于2012年底将业务重心调整到3D打印行业,uCRobotics也成为国内最早进入该领域的为数不多的厂家之一。严格的说,3D打印技术也属于机器人的一种,所以与uCRobotics公司的创建初衷也并不相悖。
这里插播一条广告:
目前还有全球仅存的5套SRV-1机器人,有兴趣收藏的朋友可以联系南极熊微信:xiong3dp,优惠价6000元/套。附带赠送如下资源:
• SRV-1全套硬件设计图(Google上都已经搜不到了);
• SRV-1各个版本的固件源代码;
• SRV-1移动客户端软件,iOS和Android版本(NDSL版本的不一定能找着了)。

虽然公司的业务重心有所调整,但机器人研究的步伐却并没有改变。任何创新都是由模仿开始的,比如我们的SRV-A机器人,即是基于SRV-1演变而来,通过与Arduino相结合,可以极大降低引入各种传感器模块的难度(虽然SRV-1也能支持如GPS之类的原生模块,但涉及到底层开发,难度较大,一般高校学生还难以入手),便于客户进行一些特定功能的开发和调试。
二、SRV-A扩展机器人
基于SRV-1扩展而来,通过整合Arduino易用的特性,默认可支持GPS、陀螺仪、超声波及红外等各种传感器的数据采集。

下图是给燕山大学定制的带有各种传感器的机器人产品:
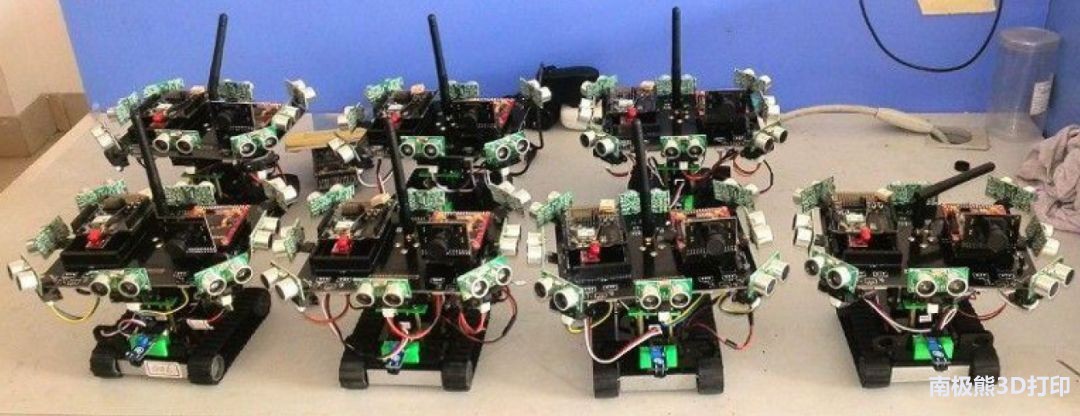
可以看出,当时并没有产品设计方面的概念,客户需要什么,我们就增加什么,所以最后看起来像个刺猬。在此也非常感谢客户的包容和支持。
同时还提供一款功能丰富的客户端软件,各区域功能包括:GPS地图定位,陀螺仪3D姿态反馈,超声波测距,虚拟摇杆控制以及视频保存等功能。

除了功能扩展,对于SRV-1的核心控制模块,我们也做了升级,使用价格更便宜的BF525替代BF537,可以降低不少成本。
三、UCR-1升级机器人
UCR-1 是一款多功能履带式机器人,使用性价比更高的BF525主控芯片,属于SRV-1的升级版本,具有如下特点:
• 所有部件完全国产化,便于成本控制;
• 底盘默认增加了一个防撞传感器;
• 丰富的运控板接口,便于各种传感器模块的扩展;
• 支持uCLinux操作系统,用户可以方便的获得很多系统库的支持,如OpenCV 图形处理软件等。

四、UCR-H人形足球机器人
通过对机器人摄像头模块采集的图像数据进行处理,可以实现很多应用。比如UCR-H人形机器人,就是将UCR-1的核心模块与一个人形机体相结合,然后配合图像识别算法,就会产生一个带有视觉识别功能的足球机器人。全国每年大学生足球机器人比赛(RoboCup)项目中,UCR-H就是其中一个重量级选手,并且多次获奖。

追球的视觉算法如下所示(原理是一样,车体定位到球后是撞,人型定位到球是踢):
球体追踪
五、UCR-2承重机器人
无论是SRV-1或是UCR-1机器人,特点都是比较小巧;当然缺点就是无法承重。于是我们推出了一款可承重10KG左右的UCR-2机器人。
基于UCR-2开发的一款一氧化碳气体检测机器人,搭载的iTrans传感器很沉,重约5KG。通过客户端可以实时查看到当前环境中一氧化碳的浓度,可用于危险气体检测,危险环境探测等用途。
下图是借助煤气灶检测煤气释放过程中空气里一氧化碳气体的浓度读数。

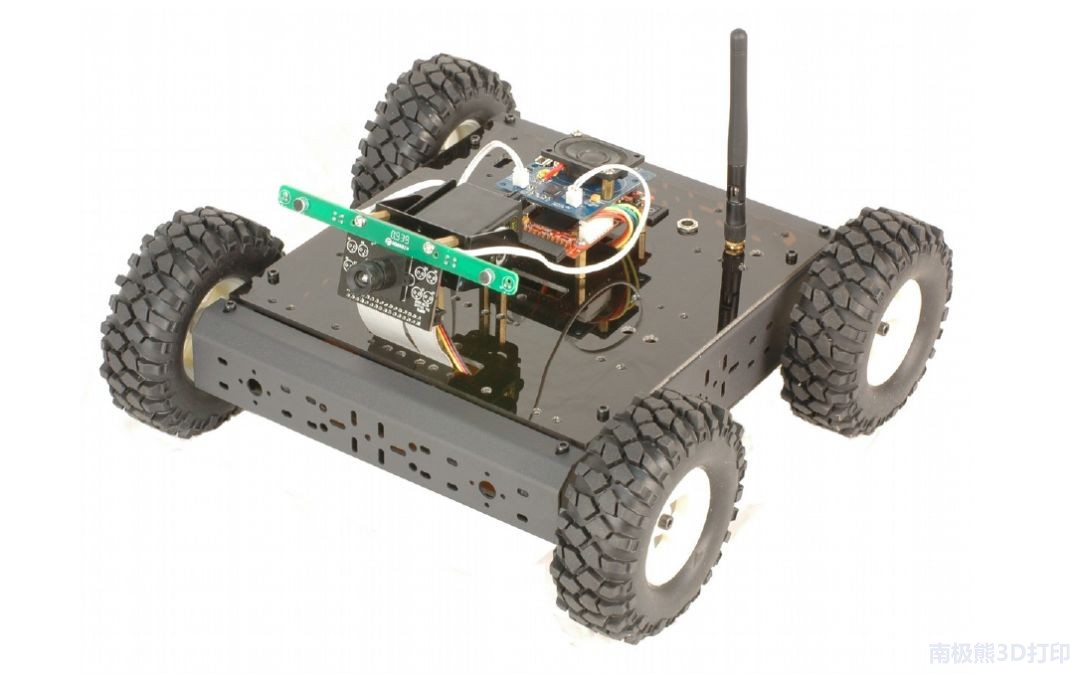
六、UCR-3越野机器人
视觉机器人还有一个重要用途是用于野外作业。UCR-3是一款为野外作业而开发的越野攀爬机器人产品,搭载美国进口越野底盘,轻松应付野外复杂多变的地形,适合侦查、勘探、探险等任务。
美国进口底盘特点:
• 大功率电调
• 液压避震
• 独立式悬挂
• 超强越野攀爬能力
• 独立舵机转向

七、MeterBot智能抄表机器人
视觉机器人不仅可以用于找球踢球,还可以用在更多其它图像识别的领域,如市政的水表、电表智能读取及数据上传解决方案。
MeterBot即是对此应用场景而研发的一款智能抄表机器人产品,配合便携的平板电脑,实现自动识别并读取水表数据,然后同步上传到远端的数据平台之中。该智能抄表系统不仅提升了抄表的效率,更可替代人员下井操作,极大降低工作人员的安全风险。

智能读表过程如下:

八、Bubro识物机器人
Bubro是一款以Bubblegum 96board为核心控制模块的AI机器人产品,特点如下:
• 支持Google TensorFlow智能框架;
• 对图像数据进行GPU本地化运算,无需联网;
• 能识别常见的近千种物体,并通过语音播报出物体名称;
• 支持用户按照自己的需求训练新的模型。

说明一下,Bubro外观是借用了日本开源机器人Rapiro的外壳STL文件3D打印的,所以外观看起来很相像。但核心模块是我们自己的Bubblegum 96board智能平台,同时搭载了一个高清摄像头模块。

物体识别过程演示如下:
九、Ultron-0室内定位导航机器人
十年磨一剑,一朝现锋芒!
如果说之前的所有尝试主要针对教育和科研市场,那么2018年推出的Ultron-0(奥创,小名奥胖)机器人则是针对专业应用领域。
Ultron是什么?
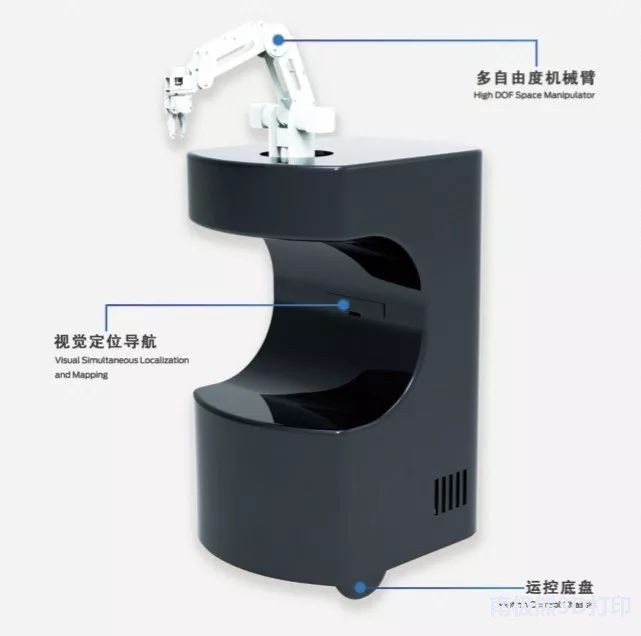
Ultron-0是一款专业的VSLAM(Visual Simultaneous Localization and Mapping,基于视觉的即时定位与地图构建)机器人。通俗的讲,就是一款可进行室内地图构建及智能导航和精准定位的机器人产品,又称室内自动驾驶机器人。
Ultron应用在什么环境?
主要用于室内环境,即没有GPS或是北斗之类卫星通讯信号的地方。如生产车间、大型厂房、机场等。
Ultron具有什么特点?
• 搭载深度双目摄像头,支持快速构建3D点云地图;
• 搭载多自由度机械臂,支持抓取、吸附等各种操作;
• 搭载高精度运动底盘,确保精准的路径导航;
• 支持动态避障,具有人性化躲避障碍物及防卡死策略;
• 支持多级高精度定位算法,定位精度可达毫米级;
• 支持在自动探索模式下进行动态地图构建;
Ultron可用于什么领域?
• 自动化生产领域,如连续3D打印;
• 封闭空间内的自动驾驶载体,如机场或是大厂房内可用于载人的自动驾驶小车;
• 未来的家庭陪护机器人;
Ultron最大的优势是什么?
定位精度!
这里需要说明一下生产线机器人(机械臂)与Ultron这种移动机器人的差别。生产线机器人(如汽车装配流水线)的定位精度可以做到很高,一般都可以做到毫米级以下,精度高的可以达到十几微米。原因是它们是固定的,自身机械结构能达到什么精度,定位就能达到什么精度。而移动机器人的精度控制起来就困难得多,因为移动过程本身就会产生很多误差。Ultron机器人采用了独创的多级定位策略才实现了毫米级定位的目标。
机器人是人类的梦想,也是我们一直的坚持。十年的积累与沉淀,造就了Ultron-0的诞生。

鲁迅的那句话:
由此也成功的验证了
世上本没有路,
趟平所有的坑,
自然就成了路!
2018年6月13 ~ 15日,上海新国际博览中心N1馆1287,Ultron-0将首次亮相,届时会在现场进行一些相关功能的演示,期待与大家不见不散!
尾声:
十年一剑,十年一叹;
新的起点,新的征程!
仅以一首七言抒怀一下这十年的机器人情缘:
雏鹰展翅志高远,
百舸争流竞远航;
折戟沉沙心不改,
十年生死两茫茫;
韶华已随风逝去,
江风吹老少年郎;
执此一念终无悔,
霾消雾散任翱翔!
2年后,随着原公司业务方向的调整,于是成立了uCRobotics公司,主营机器人相关的产品和技术研发。下面简要介绍一下这些年折腾的过各种机器人产品。
一、SRV-1履带式机器人 & SVS双目机器人
产品特点:
• 体积小巧,只有手掌大小;
• 带有摄像头,其中SVS是双目的,可以实现立体成像(那个年代,还大多停留在单片机巡线机器人、灭火机器人水平,复杂的应用场景需要一个大个机体背着一个笔记本电脑进行数据处理,鲜有自带视觉的机器人产品);
• 功能丰富,内置上百个交互指令;
• 软硬件开放,用户可添加自己的模块和控制指令;
• 内置解释器,可以实现自主运动和控制;
• 无线遥控,带有无线wif模块;
• 支持第三方控制编程软件RoboRealm;
• 丰富的客户端软件支持,Java/Python客户端,iOS客户端,Android客户端,NDSL客户端等,其中后面三种移动客户端都是引入到国内后我们自己添加的。
核心参数:
• 处理器:500MHz 的 ADI Blackfn BF537(1000 mips), 32MB SDRAM, 4MB SPI Flash
• 摄像头:Omnivision OV7725, 30 万像素
• 驱动:双路直流齿轮电机
• 规格:120mm 长 x 100mm 宽 x 80mm 高
• 重量:约 350 克(SVS双目版本约500克)
• 电源:7.2V 2Ah 锂电池,使用时间大约 4 小时
根据应用场景的需求,还可以增加云台结构,实现视觉的180°旋转;除此之外,还可以增加对GPS等传感器模块的支持。
如果需要外壳,我们后来还提供了3D打印外壳的服务:
当时的官方论坛支持的非常好,文档也很丰富,再加上产品的系统固件也一直获得持续的更新升级,所以用户非常广泛,尤其是创客文化非常普及的欧美,几乎所有的高校都是该产品的用户。当然国内的市场表现也是一片大好。
该产品还上了美国CNN栏目。
然而天有不测风云,2011年该产品的核心创始人不幸离世了,该公司也面临解散。虽然此时我们完全可以在国内制造该产品,但官方的支持减弱了(论坛勉强又运维了2年左右也彻底关闭了),系统升级也中断了,所以产品的生命力也就此结束了。除此之外,机器人在那个年代还属于非常小众的产品,再加上技术上的约束,一时还找不到进一步的突破点。
鉴于此,公司于2012年底将业务重心调整到3D打印行业,uCRobotics也成为国内最早进入该领域的为数不多的厂家之一。严格的说,3D打印技术也属于机器人的一种,所以与uCRobotics公司的创建初衷也并不相悖。
这里插播一条广告:
目前还有全球仅存的5套SRV-1机器人,有兴趣收藏的朋友可以联系南极熊微信:xiong3dp,优惠价6000元/套。附带赠送如下资源:
• SRV-1全套硬件设计图(Google上都已经搜不到了);
• SRV-1各个版本的固件源代码;
• SRV-1移动客户端软件,iOS和Android版本(NDSL版本的不一定能找着了)。
虽然公司的业务重心有所调整,但机器人研究的步伐却并没有改变。任何创新都是由模仿开始的,比如我们的SRV-A机器人,即是基于SRV-1演变而来,通过与Arduino相结合,可以极大降低引入各种传感器模块的难度(虽然SRV-1也能支持如GPS之类的原生模块,但涉及到底层开发,难度较大,一般高校学生还难以入手),便于客户进行一些特定功能的开发和调试。
二、SRV-A扩展机器人
基于SRV-1扩展而来,通过整合Arduino易用的特性,默认可支持GPS、陀螺仪、超声波及红外等各种传感器的数据采集。
下图是给燕山大学定制的带有各种传感器的机器人产品:
可以看出,当时并没有产品设计方面的概念,客户需要什么,我们就增加什么,所以最后看起来像个刺猬。在此也非常感谢客户的包容和支持。
同时还提供一款功能丰富的客户端软件,各区域功能包括:GPS地图定位,陀螺仪3D姿态反馈,超声波测距,虚拟摇杆控制以及视频保存等功能。
除了功能扩展,对于SRV-1的核心控制模块,我们也做了升级,使用价格更便宜的BF525替代BF537,可以降低不少成本。
三、UCR-1升级机器人
UCR-1 是一款多功能履带式机器人,使用性价比更高的BF525主控芯片,属于SRV-1的升级版本,具有如下特点:
• 所有部件完全国产化,便于成本控制;
• 底盘默认增加了一个防撞传感器;
• 丰富的运控板接口,便于各种传感器模块的扩展;
• 支持uCLinux操作系统,用户可以方便的获得很多系统库的支持,如OpenCV 图形处理软件等。
四、UCR-H人形足球机器人
通过对机器人摄像头模块采集的图像数据进行处理,可以实现很多应用。比如UCR-H人形机器人,就是将UCR-1的核心模块与一个人形机体相结合,然后配合图像识别算法,就会产生一个带有视觉识别功能的足球机器人。全国每年大学生足球机器人比赛(RoboCup)项目中,UCR-H就是其中一个重量级选手,并且多次获奖。
追球的视觉算法如下所示(原理是一样,车体定位到球后是撞,人型定位到球是踢):
球体追踪
五、UCR-2承重机器人
无论是SRV-1或是UCR-1机器人,特点都是比较小巧;当然缺点就是无法承重。于是我们推出了一款可承重10KG左右的UCR-2机器人。
基于UCR-2开发的一款一氧化碳气体检测机器人,搭载的iTrans传感器很沉,重约5KG。通过客户端可以实时查看到当前环境中一氧化碳的浓度,可用于危险气体检测,危险环境探测等用途。
下图是借助煤气灶检测煤气释放过程中空气里一氧化碳气体的浓度读数。
六、UCR-3越野机器人
视觉机器人还有一个重要用途是用于野外作业。UCR-3是一款为野外作业而开发的越野攀爬机器人产品,搭载美国进口越野底盘,轻松应付野外复杂多变的地形,适合侦查、勘探、探险等任务。
美国进口底盘特点:
• 大功率电调
• 液压避震
• 独立式悬挂
• 超强越野攀爬能力
• 独立舵机转向
七、MeterBot智能抄表机器人
视觉机器人不仅可以用于找球踢球,还可以用在更多其它图像识别的领域,如市政的水表、电表智能读取及数据上传解决方案。
MeterBot即是对此应用场景而研发的一款智能抄表机器人产品,配合便携的平板电脑,实现自动识别并读取水表数据,然后同步上传到远端的数据平台之中。该智能抄表系统不仅提升了抄表的效率,更可替代人员下井操作,极大降低工作人员的安全风险。
智能读表过程如下:
八、Bubro识物机器人
Bubro是一款以Bubblegum 96board为核心控制模块的AI机器人产品,特点如下:
• 支持Google TensorFlow智能框架;
• 对图像数据进行GPU本地化运算,无需联网;
• 能识别常见的近千种物体,并通过语音播报出物体名称;
• 支持用户按照自己的需求训练新的模型。
说明一下,Bubro外观是借用了日本开源机器人Rapiro的外壳STL文件3D打印的,所以外观看起来很相像。但核心模块是我们自己的Bubblegum 96board智能平台,同时搭载了一个高清摄像头模块。
物体识别过程演示如下:
九、Ultron-0室内定位导航机器人
十年磨一剑,一朝现锋芒!
如果说之前的所有尝试主要针对教育和科研市场,那么2018年推出的Ultron-0(奥创,小名奥胖)机器人则是针对专业应用领域。
Ultron是什么?
Ultron-0是一款专业的VSLAM(Visual Simultaneous Localization and Mapping,基于视觉的即时定位与地图构建)机器人。通俗的讲,就是一款可进行室内地图构建及智能导航和精准定位的机器人产品,又称室内自动驾驶机器人。
Ultron应用在什么环境?
主要用于室内环境,即没有GPS或是北斗之类卫星通讯信号的地方。如生产车间、大型厂房、机场等。
Ultron具有什么特点?
• 搭载深度双目摄像头,支持快速构建3D点云地图;
• 搭载多自由度机械臂,支持抓取、吸附等各种操作;
• 搭载高精度运动底盘,确保精准的路径导航;
• 支持动态避障,具有人性化躲避障碍物及防卡死策略;
• 支持多级高精度定位算法,定位精度可达毫米级;
• 支持在自动探索模式下进行动态地图构建;
Ultron可用于什么领域?
• 自动化生产领域,如连续3D打印;
• 封闭空间内的自动驾驶载体,如机场或是大厂房内可用于载人的自动驾驶小车;
• 未来的家庭陪护机器人;
Ultron最大的优势是什么?
定位精度!
这里需要说明一下生产线机器人(机械臂)与Ultron这种移动机器人的差别。生产线机器人(如汽车装配流水线)的定位精度可以做到很高,一般都可以做到毫米级以下,精度高的可以达到十几微米。原因是它们是固定的,自身机械结构能达到什么精度,定位就能达到什么精度。而移动机器人的精度控制起来就困难得多,因为移动过程本身就会产生很多误差。Ultron机器人采用了独创的多级定位策略才实现了毫米级定位的目标。
机器人是人类的梦想,也是我们一直的坚持。十年的积累与沉淀,造就了Ultron-0的诞生。
鲁迅的那句话:
由此也成功的验证了
世上本没有路,
趟平所有的坑,
自然就成了路!
2018年6月13 ~ 15日,上海新国际博览中心N1馆1287,Ultron-0将首次亮相,届时会在现场进行一些相关功能的演示,期待与大家不见不散!
尾声:
十年一剑,十年一叹;
新的起点,新的征程!
仅以一首七言抒怀一下这十年的机器人情缘:
雏鹰展翅志高远,
百舸争流竞远航;
折戟沉沙心不改,
十年生死两茫茫;
韶华已随风逝去,
江风吹老少年郎;
执此一念终无悔,
霾消雾散任翱翔!
(责任编辑:admin)

 创想三维:解析3D打印机制
创想三维:解析3D打印机制 深圳长朗科技将在Kickstar
深圳长朗科技将在Kickstar 华中科大基于粉床激光增材
华中科大基于粉床激光增材 3D打印无人机高效种植 快
3D打印无人机高效种植 快 立体易体验活动之香港圣公
立体易体验活动之香港圣公 过节不收礼,猜下我们给广
过节不收礼,猜下我们给广最新内容
 创想三维:FYT战
创想三维:FYT战 创想三维:光固化
创想三维:光固化 构造立体美学,3D
构造立体美学,3D热点内容


