UCLA郑小雨教授:3D打印机器人超材料,可以感知环境、自主导航!
时间:2022-06-29 10:34 来源:高分子科学前沿 作者:admin 阅读:次

目前大多数机器人,无论其大小,通常都是通过一系列复杂的制造步骤构建的,这些步骤集成了肢体、电子和有源组件。与用提供不同功能的独立部件来建造机器人相比,用多功能超材料建造的机器人具有一定的优势。超材料是一种由重复图案组成的合成结构,旨在表现出理想的宏观特性。与大宗材料不同,超材料的行为受其工程结构的制约,而不是纯粹由其材料构成驱动。增材制造技术,如3D打印,已经加速了复杂的超材料的制造,其规模越来越小,功能也前所未有。传统上,制造机器人依赖于组装离散的执行器、传感器、微处理器和电源。机器人超材料通过在超材料的周期性结构中构思自主性来挑战这种模式。
从历史上看,超材料的研究主要集中在光学应用上,例如具有超出普通透镜和反射镜能力的可调谐光学特性的超材料。然而,近年来,研究人员越来越多地转向在其他领域采用这种设计原理。比如无需使用传动齿轮即可将线性运动转换为旋转的机械超材料,或能够按需调整刚度或变形等体积特性的镶嵌机器人群。创造机器人超材料的另一条途径是在结构中体现“机器人任务”。例如,人们可以设计一种超材料,其变形可以通过电信号进行控制。
鉴于此,最新一期《Science》期刊在线发表了加州大学洛杉矶分校的郑小雨教授团队的新成果。该团队开发了一种新的设计策略和 3D 打印技术,可以一步构建机器人。第一作者为崔华晨。
具体而言,作者开发了一种合理设计压电超材料的方法,该材料由无源、压电有源和导电相组成,可以执行一些机器人任务(Figure1)。所需的变形模式,例如扭曲,近似为一些通过结构的离散平面的运动。反过来,这些平面的允许运动将告知结构相、致动器和电极应如何在压电超材料内组织以产生目标运动。在经典的弹性理论中,弹性材料的变形以拉伸、压缩和剪切为特征。本文作者应用了微极弹性,通过在平移之上结合旋转来扩展经典弹性。这种方法能够更全面地评估压电超材料的宏观膨胀、剪切、扭曲和弯曲对其微结构、极化和施加的电场。

△示意图
实验设计
架构材料的核心概念是在 3D 单元拓扑中不受限制地放置材料,绕过天然晶体固有的限制或模仿它们以实现所需的特性。为此,作者引入了一种方便且强大的策略来构建 3D 空间中的压电活性、导电和结构相(图 1A)。因为现有的压电张量不足以描述所有的自由度,作者在 Cosserat 固体的基础上定义了广义压电张量来描述架构压电材料的应变转换(图 1B)。微结构的具体结构(晶胞)如图1C-1K所示。
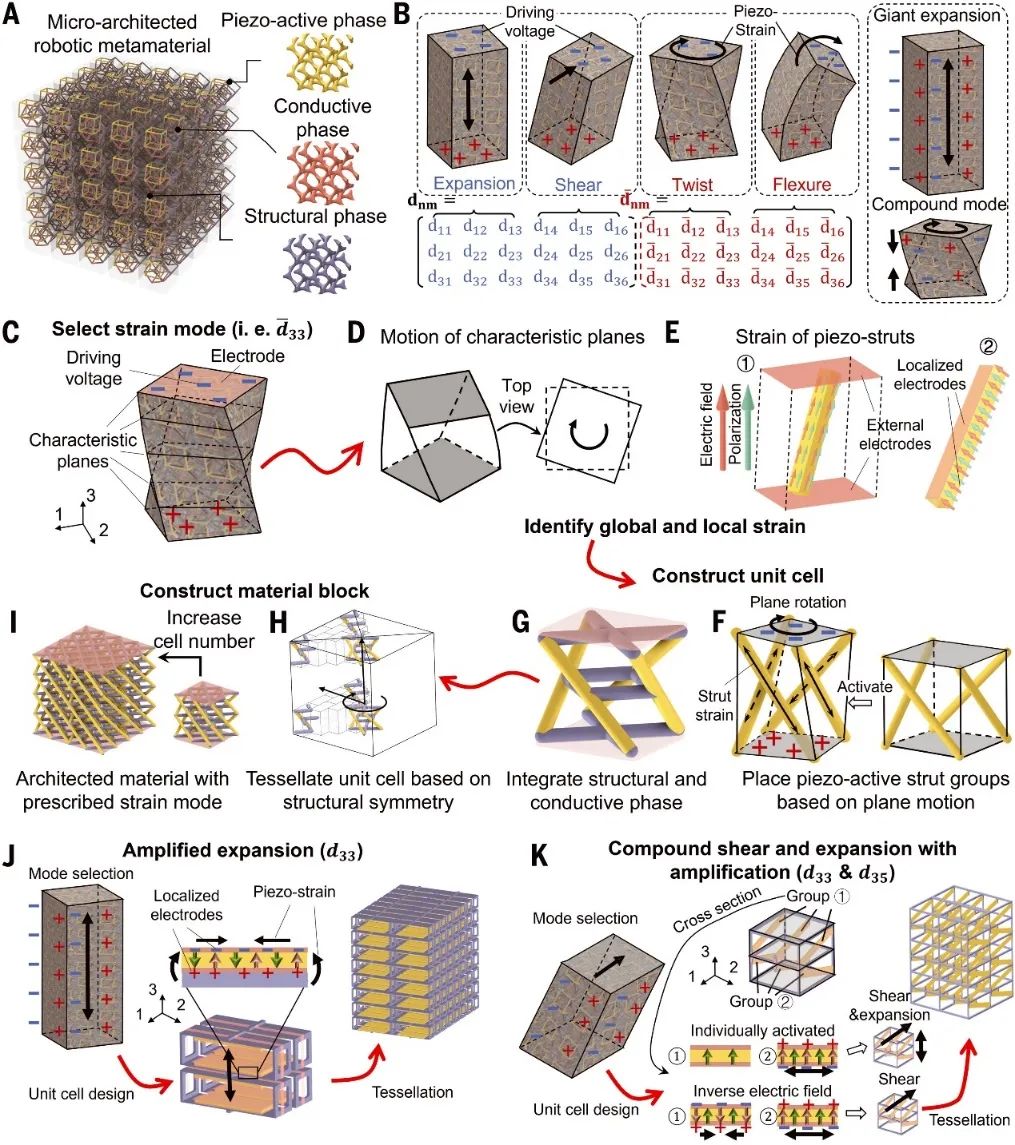
△图 1. 具有任意应变模式的机器人超材料的合理设计
(责任编辑:admin)

 新型植物性塑料耗材,拥有
新型植物性塑料耗材,拥有 武大《Small》:冷冻3D打
武大《Small》:冷冻3D打 聚合诱导微相分离对3D打印
聚合诱导微相分离对3D打印 意大利研究者研发新型3D打
意大利研究者研发新型3D打 如何打磨3D打印零件获得光
如何打磨3D打印零件获得光最新内容
 Nature发表ZrO2-S
Nature发表ZrO2-S 灵感源于骨骼,科
灵感源于骨骼,科 使用元素粉末和激
使用元素粉末和激 福建物构所光固化
福建物构所光固化热点内容


