
Ϊɶ3D��ӡ�������ŷ���������Ͳ��������ɶ����
ʱ�䣺2016-11-09 15:42 ��Դ���й�3D��ӡ�� ���ߣ��й�3D��ӡ�� �Ķ�����

���ֵ���Ķ���
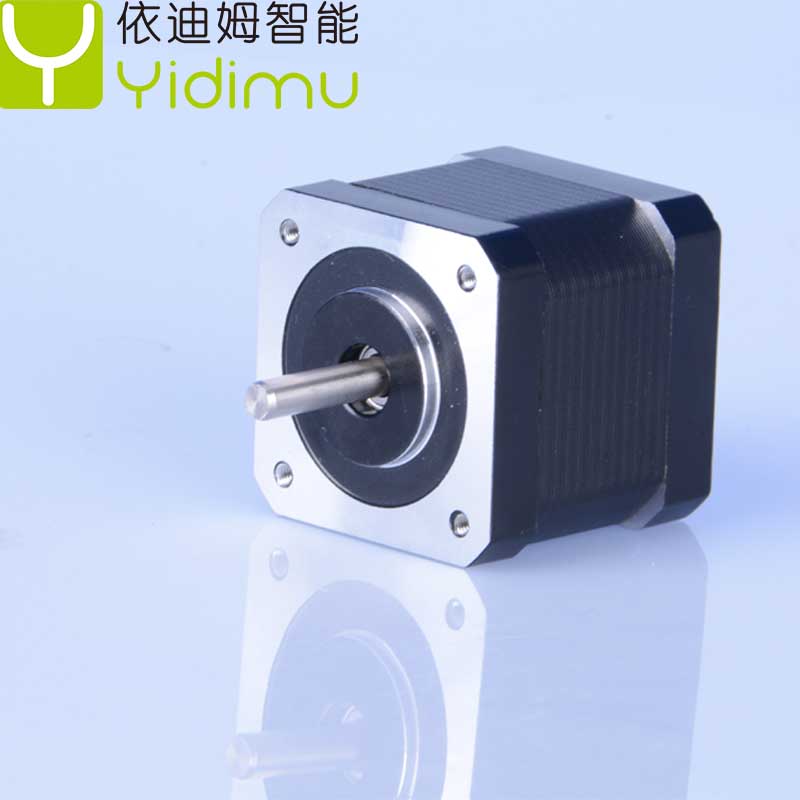
���������һ����ɢ�˶���װ�ã�������ͨ�Ľ�ֱ�������ͬ����ͨ����o���ת��������������ǣ�����������Խӵ�һ�������ִ��һ����
�ŷ������ָ���ŷ�ϵͳ�п��ƻ�еԪ����ת�ķ���������ʹ�����ٶȣ�λ�þ��ȷdz�ȷ�����Խ���ѹ�ź�ת��Ϊת�غ�ת�����������ƶ���
��Ȼ�����ڿ��Ʒ�ʽ������(���崮�ͷ����ź�)������ʹ�����ܺ�Ӧ�ó����ϴ����Žϴ�IJ��졣�־Ͷ��ߵ�ʹ��������һ�Ƚϡ�
���ƾ��Ȳ�ͬ
������ʽ������������һ��Ϊ3.6�㡢 1.8�㣬������ʽ������������һ��Ϊ0.72 �㡢0.36�㡣Ҳ��һЩ�����ܵIJ����������Ǹ�С������ͨ��˾������һ����������˿�����IJ���������䲽���Ϊ0.09�㡣
�����ŷ�����Ŀ��ƾ����ɵ�����˵���ת��������֤��������ȫ����ʽ�����ŷ����Ϊ�������ڴ���2500�߱������ĵ�����ԣ������������ڲ��������ı�Ƶ�����������嵱��Ϊ360��/10000=0.036�㡣
���ڴ�17λ�������ĵ�����ԣ�������ÿ����217=131072��������תһȦ���������嵱��Ϊ360��/131072=9.89�룬���Dz����Ϊ1.8��IJ�����������嵱����1/655��
��Ƶ���Բ�ͬ
��������ڵ���ʱ�׳��ֵ�Ƶ��������Ƶ���븺������������������йأ�һ����Ϊ��Ƶ��Ϊ�����������Ƶ�ʵ�һ�롣
�����ɲ�������Ĺ���ԭ���������ĵ�Ƶ��������ڻ�����������ת�dz���������������������ڵ���ʱ��һ��Ӧ�������Ἴ�����˷���Ƶ���������ڵ���ϼ������������������ϲ���ϸ�ּ����ȡ�
�������ŷ������ת�dz�ƽ�ȣ���ʹ�ڵ���ʱҲ����������������ŷ�ϵͳ���й������ƹ��ܣ��ɺ��ǻ�е�ĸ��Բ��㣬����ϵͳ�ڲ�����Ƶ�ʽ������ܣ��ɼ�����е�Ĺ���㣬����ϵͳ������
��Ƶ���Բ�ͬ
������������������ת�����߶��½������ڽϸ�ת��ʱ�ἱ���½�����������߹���ת��һ����300��600RPM��
�������ŷ����Ϊ�����������������ת�����ڣ�һ��Ϊ2000RPM��3000RPM������������ת�أ��ڶת������Ϊ�㹦�������
����������ͬ
�������һ�㲻���й��������������ŷ�������н�ǿ�Ĺ���������
�����½����ŷ�ϵͳΪ�����������ٶȹ��غ�ת�ع��������������ת��Ϊ�ת�ص������������ڿ˷����Ը���������˲��Ĺ������ء�
���������Ϊû�����ֹ�����������ѡ��ʱΪ�˿˷����ֹ������أ�������Ҫѡȡ�ϴ�ת�صĵ���������������������ڼ��ֲ���Ҫ��ô���ת�أ�������������˷ѵ�����
�������ܲ�ͬ
��������Ŀ���Ϊ�������ƣ�����Ƶ�ʹ����ع����׳��ֶ������ת������ֹͣʱת�ٹ����׳��ֹ������������Ϊ��֤����ƾ��ȣ�Ӧ�����������������⡣
�����ŷ�����ϵͳΪ�ջ����ƣ���������ֱ�ӶԵ�������������źŽ��в������ڲ�����λ�û����ٶȻ���һ�㲻����ֲ�������Ķ������������������ܸ�Ϊ�ɿ���

�ٶ���Ӧ���ܲ�ͬ
��������Ӿ�ֹ���ٵ�����ת�٣�һ��Ϊÿ���Ӽ���ת����Ҫ200��400���롣
�������ŷ�ϵͳ�ļ������ܽϺã�������MSMA 400W�����ŷ����Ϊ�����Ӿ�ֹ���ٵ���ת��3000RPM���輸���룬������Ҫ�������ͣ�Ŀ��Ƴ��ϡ�
���������������ŷ�ϵͳ���������ܷ��涼���ڲ������������һЩҪ�ߵij���Ҳ�����ò����������ִ�е綯����
(���α༭��admin)
�������
 ʲô��FDM�IJģ����ھʹ�
ʲô��FDM�IJģ����ھʹ� ��������3D��ӡ��������
��������3D��ӡ�������� dz�����ֳ���3D��ӡ���ϵ�
dz�����ֳ���3D��ӡ���ϵ� ͨ����������ؿ���ѡ����
ͨ����������ؿ���ѡ���� 3D��ӡ��֪ʶС����
3D��ӡ��֪ʶС���� ��̻���ӡ���Ϳ���Ҫע��
��̻���ӡ���Ϳ���Ҫע����������
 ʹ��FDM3D��ӡ��3
ʹ��FDM3D��ӡ��3 3D��ӡģ�ͳ�����
3D��ӡģ�ͳ����� FDM 3D��ӡ������
FDM 3D��ӡ������ ����Ϳ��Ʒ�ĩ��
����Ϳ��Ʒ�ĩ�� ��ȡ�ȫ�� ����
��ȡ�ȫ�� �����ȵ�����
