卡内基梅隆大学推出构建3D打印腿式或轮式机器人的交互式设计工具
近日,卡内基梅隆大学机器人研究所的技术向导开发了一种交互式设计工具,可以让机器人有能力使用3D打印组件和现成的执行器来构建定制的腿式或轮式机器人。
据悉,研究人员开发出的这款交互式设计工具可以让包括新手或专家在内的用户设计自己的定制机器人,可以用3D打印零件和现成的组件构建。 用户可以看到一个简单的拖放界面,可以从这些界面中选择一个机器人组件库。该工具建议相互兼容的组件,指出执行器,并可以自动生成可3D打印的结构部件来连接那些执行器。

该工具甚至提供了一个模拟环境,用于在构建机器人之前测试机器人,因此用户可以准确地看到机器人将如何在物理世界中移动和运作。卡内基・梅隆(Carnegie Mellon)机器人助理教授Stelian Coros说:“今天创造新的机器人系统的过程非常具有挑战性,非常耗时、耗力。但是在不久的将来,机器人将会成为日常生活的一部分,更多的人将要定制机器人。这种类型的交互式设计工具可以使任何人都可以操作。”
Coros和他的团队使用这个工具,尝试构建了许多不同的步行和轮转机器人。一个是带机械臂的轮式机器人,可以拿一支钢笔来画画;另一个类似于四条腿的小狗,可以向前或向侧走。

另一名研究人员Ruta Desai说:“该系统可以轻松实验不同身体比例和电机配置,并了解这些决定如何影响机器人执行某些任务的能力。”
“例如,我们在模拟中发现,我们对小狗的一些初步设计使它只能向前走,而不能侧身。我们纠正了最终的设计。我们实际构建的机器人的运动与我们在模拟中证明的所需运动相匹配。”
迭代设计工具甚至包括“自动完成”功能,通过搜索自动生成可能的组件。这意味着新手用户可以简单地在屏幕上安排一些首选元素,然后再让应用程序做出努力。
Coros说:“我们的工作旨在使机器人更易于临时用户使用。这很重要,因为在自己使用机器人设备方面发挥积极作用的人更有可能对他们有积极的感觉和更高质量的互动。这可以加速日常生活中机器人的采用。”
前天,Desai在新加坡举行的IEEE国际机器人和自动化大会(ICRA 2017)上做了设计工具的报告。Desai和Coros与硕士生Ye Yuan合作完成了该项目。
Coros对于这种机器人构建设计工具并不陌生。早在2015年,助理教授就参与了迪士尼机器人研究设计应用。两周前,加利福尼亚大学圣地亚哥分校的工程师们制作了一款3D打印软体机器人,可以在粗糙的表面上行走。
(责任编辑:admin)

 大西洋大学开发用于食道癌
大西洋大学开发用于食道癌 Ashley Furniture在制造过
Ashley Furniture在制造过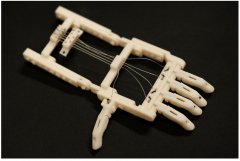 看美国研究人员如何继续改
看美国研究人员如何继续改 ITAMCO和普渡大学合作为美
ITAMCO和普渡大学合作为美 汉高收购美国一3D打印公司
汉高收购美国一3D打印公司 加拿大卫生部发布医疗设备
加拿大卫生部发布医疗设备

