�ɴ�ӡ�������쵼�絯�������ڸ߱����̬Ӧ��
ʱ�䣺2022-08-23 09:08 ��Դ�������ӡ���������� ���ߣ�admin �Ķ�����
�ɴ�ӡ�������쵼�絯�����ڿɴ������Ӳ�Ʒ���������˵ȷ�����й�����Ӧ��ǰ����Ȼ���������ĵ�����ϵĶ�̬���ܺ��ٵõ��о������ڼ�̬Ӧ�䷽��ͨ�����ֲ��ѣ������ź�ʧ�桢��ʧ�ؼ���������־��ȱ�����������ǵ�ʵ��Ӧ�á�
���ڣ��廪��ѧ��������ϵ���ٽ����Ŷ���Advanced Functional Materials�ڿ�������Ϊ ��Printable and Stretchable Conductive Elastomers for Monitoring Dynamic Strain with High Fidelity�������£������һ�־��г�ɫ�Ķ�̬���ܵ�Ag-Ecoflex- PDMS�����壨EAP����Ag-Ecoflex-PDMS��������иߵ絼�ʣ����������������ȣ����ֵ�������ڼ�̬Ӧ�䷽����и�С�Ĺ�����Ӧ�����ߵ�Ӧ�������Ⱥ��͵��ͺ��ԡ�ͬʱ���Ŷ������һ�ֻ������ѧϰ�Ķ�̬У�������ɹ���У���˴����źŲ����ͺ�����0.1%�����Ŷ�������ĵ��縴�ϵ������붯̬У���������嶯̬���⡢�˻�Э����������ʵ��Ӧ����չ�ֳ�������ƺ�DZ����
��������
�����쵼�絯����������ɴ��������豸���������˺�ֲ��ʽҽ���豸�Ŀ����촫����������쵼�塣ͨ����������ĵ��絯�����������������ϵĵ�����Բ��ϡ�������Բ���ͨ���ǹ��е�����ϻ���ͨ�����������/����ۺ����϶��γɡ������о���Ա�Ѿ������˶��ֿ�����װ�ã�ͨ��ʹ�ù�̼�����ת�Ƽ��������ӡ������������Բ���װ�䵽����������ϡ����У���ӡ���������������ɱ�������Ч�ʳ�Ϊһ�����������ķ�ʽ��
���ڶԿɴ�ӡ������ϵ��о������絯����ĵ����ԡ�Ӧ�������Ժ������Զ����������ĸ��ơ���Ȼʹ�û��ڵ������/���ߵĵ��絯�����Ӧ�䴫�����ѱ��㷺����������ЩӦ�䴫�����Ķ�̬���ܺ��ٵõ��о���������о�ֻ�漰���絯�������Ϊ����̬���ʣ��������о���עӦ�䴫�����ڼ�ض�̬�˶�ʱ���źű���ȣ�������ʵ�����е�����/֫���˶��������˶����ڼ����Щ��̬�˶�ʱ��ʹ�õ�����ϵ�Ӧ�䴫����ͨ���������ź�ʧ�����⣬Ӧ��в�������˽��ͣ�����Ϊ������Ӧ�������Ƚ��͡��ǵ����в����Եȡ��ź�ʧ������㷺�����ڴ������̬Ӧ�䴫�н���У��������ò������ӡ�����ʵ��Ӧ���У�Ӧ�䴫�������źű��������������ʵ�ؽ��������źż�ء��������������-�����˽����ȶ�ܼ�������зdz���Ҫ��
��ˣ����о������һ���µľ��и߱������ܵĶ�̬Ӧ�䴫�еĹ��ܲ��ϡ����Ŷ�ͨ����PDMS�����ϴ�ӡ����Ϊ������Ecoflex����īˮ���õ���ΪAg-Ecoflex-PDMS�ĵ��絯���塣Ag-Ecoflex-PDMS�ڶ�̬Ӧ���±��ֳ������Ӧ�䴫�����ܣ�����Ϊ��С�Ĺ��塢���ߵ�Ӧ�������Ⱥ��͵��ͺ��о�ͨ��ʹ�û������ѧϰ��У��������һ��У��Ag-Ecoflex-PDMS��Ӧ����Ӧ��ʹ������������ 0.1%���ڡ�����Ag-Ecoflex-PDMS��Ӧ�䴫���������ڸ߱���ؼ������֫��Ķ�̬�˶���ʵ�����˻�Эͬ��ƹ����չʾ��������ĵ��縴�ϵ������ڼ�����嶯̬����˻�Эͬ��������ʵ��Ӧ���е���Խ�Ժ���ǰ����
ʵ�����
1.���絯���������������еĵ�����
�����쵼�絯���������ӡ�ھۺ�������ϵĵ��籡Ĥ�����У����籡Ĥ�ɵ�������͵����������ɡ�����������ȷ�ɢ�ڵ�����������γɵ������磬��������ͷŹ����У����������ۺ�����ĵ�Ӧ����ƶ������µ��絯����ĵ���Ӧ��ͼ1cչʾ�˴������ӡ���絯�����ڶ�̬�����ͷ�ѭ���ڼ�Ĵ����Ե���Ӧģ�͡�������ĵ�һ�Σ�ͼ1d��I�����������췽���������絯����������Ӧ���²��������ĵ���������Ӷ������˵�������ĽӴ������ӵ���ᡣ���絯�����еĵ���ͨ·��С����˵����������ĵ�����Ӧ���ӡ�������ĵڶ��Σ�ͼ1d��II���������ڵ�����ĺ����ɱ��Σ������µĵ��絯����Ҳ���ܺ����ѹӦ�������������ں����Ͻ��ܾۼ����������˵������ӵĽӴ������ӵ���ᣬ����ͨ·��Ӧ���ӣ���˵�����������ĵ����С��������ĵ��絯���屻�ͷ�ʱ����ᷢ���෴�Ķ�̬��Ϊ��
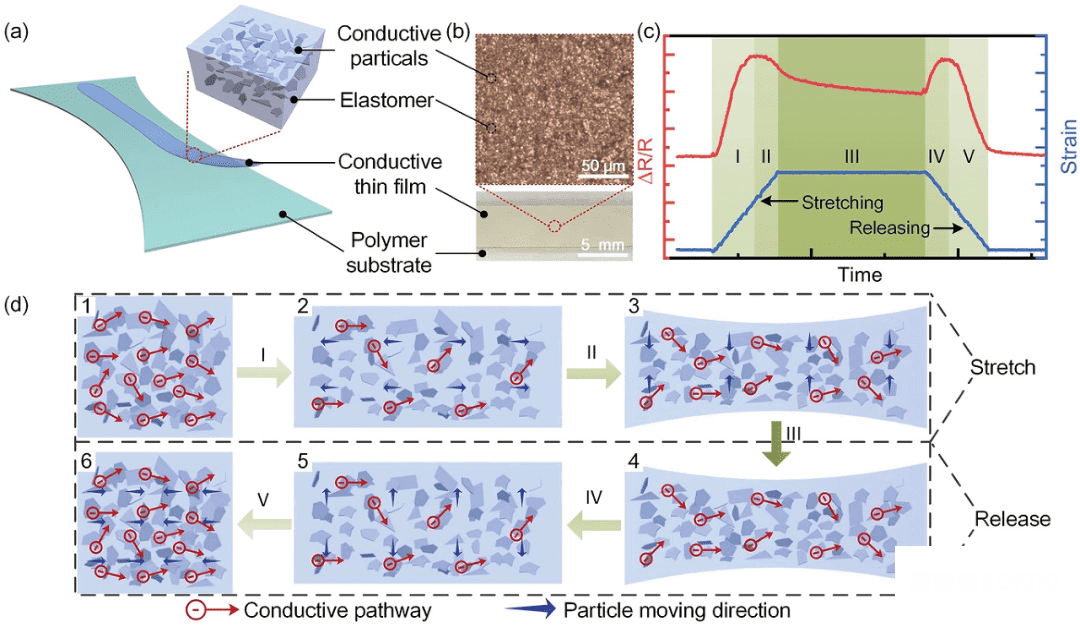
ͼ1 �����쵼�絯���弰��Զ�̬������ͷŵĵ���Ӧ
2.���絯����EAP��������ѧϰ�Ķ�̬У
����ͨ·�غ��������IJ�Э���Ķ�̬��Ϊ�������˵��絯�����Ӧ��̼��Ķ�̬��Ӧ���Ӷ��������ͷ������в������壬����塣�����ص��ǣ���������羺�����ܵ��·ǵ���Ӧ�䴫�к������Ƚ��ͣ�ͼ2c��d���������쵼�絯�������Щ�ϲ�ĵ���ѧ��������������������ΪӦ�䴫������ʵ��Ӧ�á�

ͼ2 ����īˮ��������Ϊ72.0%ʱ��ͬ���Ŀ����쵼�絯������������ͷ�ʱ��Ӧ�䴫����Ӧ
Ϊ�����Ӧ�䴫���������ܣ����о������һ����ΪEAP�ĵ��絯���塣���Ŷӽ���Ƭ���Ϻ�Ecoflex���ʣ�EAīˮ����ɵĵ��籡Ĥ(100um��)��ӡ��PDMS���ף�1mm���ϣ��õ���EAP����PDMS�����滻ΪEcoflex������õ���EAE�����Ŷ�ͬ�����EAE��EAP�������ͷ�ѭ��������40%Ӧ�䣩�еĵ�����Ӧ�ԱȽ����ǵ�Ӧ�䴫�����ܡ�ʵ������ͼ2a��ʾ��EAE�Ķ�̬��Ӧ�д������Եļ�壬Ȼ������EAP�ķ�Ӧ�У���������EAP�Ľ���һ��ԭ����EAE�ĺ����ɱ��α�EAP�ĺ����ɱ��θ�ǿ�ң�ͼ2b����EAP����EAE����һ��ԭ���ǣ���PDMS��ȣ���Ϊ����īˮ��������Ecoflex���ʾ�����Խϵ͵�����ģ���������������谭����īˮ��ѹ�����Σ��Ӷ����Ƶ���ͨ·�غ����������˶�ѧͬ����ͼ2c��ʾ��EAE��������ͷŹ����е���Ե���仯(10�C40%Ӧ��)�����Կ�������������������ͷŶ����С������ڶ�̬Ӧ��������ͺ���ͨ·���ƻ����ؽ�֮��ľ�����EAE������̬����Ӧ������Ӧ�������Ա�������ͼ2d��ʾ��EAE���ͺ����ԣ����������ͺ����ﵽ20.1%������EAE�ĵ���Ӧ��в���80%��Ӧ�䷶Χ�ڱ��ֳ��ǵ����ԡ����֮�£�EAP���ֳ����õ�Ӧ�䴫�����ܣ����ֳ���С�Ĺ�����ߵ������ȣ������������õĿ��ظ��ԣ��ڼ�̬Ӧ�䷽����������ơ�
Ϊ�˽�һ�������ͺ������Ŷ������һ�ֻ������ѧϰ�Ķ�̬У����У��EAP�������Ӧ�䴫���źš����ǵ��������絯������������ͷ��µĵ綯��ѧ�����Ŷ������һ�ֶ�̬У�����������dz���ľ�̬У��ͨ������ģ�͵�У��������Ӧ���ͺ��Ŷ�ʹ�����ѧϰ���������������絯�����ڶ�̬Ӧ���µĵ���Ӧ���Ӷ��ܹ�����Ӧ�䴫�����Ķ�̬��ӦԤ�������Ӧ�䡣����EAPӦ�䴫�����������õ�ѧϰ��������Ե����������ŶӲ��ó����ڼ���(LSTM)���罨���䶯̬Уģ�͡���ͼ2g��ʾ��ΪӦ�䴫��������40%Ӧ���������ͷ�ѭ���IJ��������Ӧ�䴫������ԭʼ��������Ա��ֳ�С�Ĺ���ͳ��͡�ʹ�û���LSTM�����У����У�����������ĵ������ת��Ϊ������Ӧ�䣬�õ�Ӧ����ʵ��Ӧ�伸��һ�£����й���ͳ���������������ʵ��Ӧ����ʵ��Ӧ��֮��ľ��������ﵽ0.22%�����⣬Ϊ��һ����֤�˸÷�������Ч�ԣ����Ŷӻ������˷ֲ�����/�½�Ӧ�����顣��ʵ����2h���Կ�������������У�����ʩ���ڴ������ϵ�ʵ��Ӧ����ȫ����ͬ����������Ӧ����ʵ��Ӧ��֮��ľ��������Ϊ0.84%��ͨ��ʹ�û������ѧϰ��У��Ӧ�䴫�������ͺ�������ȫ����������14.4%���͵�0.1%��
���ڣ��廪��ѧ��������ϵ���ٽ����Ŷ���Advanced Functional Materials�ڿ�������Ϊ ��Printable and Stretchable Conductive Elastomers for Monitoring Dynamic Strain with High Fidelity�������£������һ�־��г�ɫ�Ķ�̬���ܵ�Ag-Ecoflex- PDMS�����壨EAP����Ag-Ecoflex-PDMS��������иߵ絼�ʣ����������������ȣ����ֵ�������ڼ�̬Ӧ�䷽����и�С�Ĺ�����Ӧ�����ߵ�Ӧ�������Ⱥ��͵��ͺ��ԡ�ͬʱ���Ŷ������һ�ֻ������ѧϰ�Ķ�̬У�������ɹ���У���˴����źŲ����ͺ�����0.1%�����Ŷ�������ĵ��縴�ϵ������붯̬У���������嶯̬���⡢�˻�Э����������ʵ��Ӧ����չ�ֳ�������ƺ�DZ����
��������
�����쵼�絯����������ɴ��������豸���������˺�ֲ��ʽҽ���豸�Ŀ����촫����������쵼�塣ͨ����������ĵ��絯�����������������ϵĵ�����Բ��ϡ�������Բ���ͨ���ǹ��е�����ϻ���ͨ�����������/����ۺ����϶��γɡ������о���Ա�Ѿ������˶��ֿ�����װ�ã�ͨ��ʹ�ù�̼�����ת�Ƽ��������ӡ������������Բ���װ�䵽����������ϡ����У���ӡ���������������ɱ�������Ч�ʳ�Ϊһ�����������ķ�ʽ��
���ڶԿɴ�ӡ������ϵ��о������絯����ĵ����ԡ�Ӧ�������Ժ������Զ����������ĸ��ơ���Ȼʹ�û��ڵ������/���ߵĵ��絯�����Ӧ�䴫�����ѱ��㷺����������ЩӦ�䴫�����Ķ�̬���ܺ��ٵõ��о���������о�ֻ�漰���絯�������Ϊ����̬���ʣ��������о���עӦ�䴫�����ڼ�ض�̬�˶�ʱ���źű���ȣ�������ʵ�����е�����/֫���˶��������˶����ڼ����Щ��̬�˶�ʱ��ʹ�õ�����ϵ�Ӧ�䴫����ͨ���������ź�ʧ�����⣬Ӧ��в�������˽��ͣ�����Ϊ������Ӧ�������Ƚ��͡��ǵ����в����Եȡ��ź�ʧ������㷺�����ڴ������̬Ӧ�䴫�н���У��������ò������ӡ�����ʵ��Ӧ���У�Ӧ�䴫�������źű��������������ʵ�ؽ��������źż�ء��������������-�����˽����ȶ�ܼ�������зdz���Ҫ��
��ˣ����о������һ���µľ��и߱������ܵĶ�̬Ӧ�䴫�еĹ��ܲ��ϡ����Ŷ�ͨ����PDMS�����ϴ�ӡ����Ϊ������Ecoflex����īˮ���õ���ΪAg-Ecoflex-PDMS�ĵ��絯���塣Ag-Ecoflex-PDMS�ڶ�̬Ӧ���±��ֳ������Ӧ�䴫�����ܣ�����Ϊ��С�Ĺ��塢���ߵ�Ӧ�������Ⱥ��͵��ͺ��о�ͨ��ʹ�û������ѧϰ��У��������һ��У��Ag-Ecoflex-PDMS��Ӧ����Ӧ��ʹ������������ 0.1%���ڡ�����Ag-Ecoflex-PDMS��Ӧ�䴫���������ڸ߱���ؼ������֫��Ķ�̬�˶���ʵ�����˻�Эͬ��ƹ����չʾ��������ĵ��縴�ϵ������ڼ�����嶯̬����˻�Эͬ��������ʵ��Ӧ���е���Խ�Ժ���ǰ����
ʵ�����
1.���絯���������������еĵ�����
�����쵼�絯���������ӡ�ھۺ�������ϵĵ��籡Ĥ�����У����籡Ĥ�ɵ�������͵����������ɡ�����������ȷ�ɢ�ڵ�����������γɵ������磬��������ͷŹ����У����������ۺ�����ĵ�Ӧ����ƶ������µ��絯����ĵ���Ӧ��ͼ1cչʾ�˴������ӡ���絯�����ڶ�̬�����ͷ�ѭ���ڼ�Ĵ����Ե���Ӧģ�͡�������ĵ�һ�Σ�ͼ1d��I�����������췽���������絯����������Ӧ���²��������ĵ���������Ӷ������˵�������ĽӴ������ӵ���ᡣ���絯�����еĵ���ͨ·��С����˵����������ĵ�����Ӧ���ӡ�������ĵڶ��Σ�ͼ1d��II���������ڵ�����ĺ����ɱ��Σ������µĵ��絯����Ҳ���ܺ����ѹӦ�������������ں����Ͻ��ܾۼ����������˵������ӵĽӴ������ӵ���ᣬ����ͨ·��Ӧ���ӣ���˵�����������ĵ����С��������ĵ��絯���屻�ͷ�ʱ����ᷢ���෴�Ķ�̬��Ϊ��
ͼ1 �����쵼�絯���弰��Զ�̬������ͷŵĵ���Ӧ
2.���絯����EAP��������ѧϰ�Ķ�̬У
����ͨ·�غ��������IJ�Э���Ķ�̬��Ϊ�������˵��絯�����Ӧ��̼��Ķ�̬��Ӧ���Ӷ��������ͷ������в������壬����塣�����ص��ǣ���������羺�����ܵ��·ǵ���Ӧ�䴫�к������Ƚ��ͣ�ͼ2c��d���������쵼�絯�������Щ�ϲ�ĵ���ѧ��������������������ΪӦ�䴫������ʵ��Ӧ�á�
ͼ2 ����īˮ��������Ϊ72.0%ʱ��ͬ���Ŀ����쵼�絯������������ͷ�ʱ��Ӧ�䴫����Ӧ
Ϊ�����Ӧ�䴫���������ܣ����о������һ����ΪEAP�ĵ��絯���塣���Ŷӽ���Ƭ���Ϻ�Ecoflex���ʣ�EAīˮ����ɵĵ��籡Ĥ(100um��)��ӡ��PDMS���ף�1mm���ϣ��õ���EAP����PDMS�����滻ΪEcoflex������õ���EAE�����Ŷ�ͬ�����EAE��EAP�������ͷ�ѭ��������40%Ӧ�䣩�еĵ�����Ӧ�ԱȽ����ǵ�Ӧ�䴫�����ܡ�ʵ������ͼ2a��ʾ��EAE�Ķ�̬��Ӧ�д������Եļ�壬Ȼ������EAP�ķ�Ӧ�У���������EAP�Ľ���һ��ԭ����EAE�ĺ����ɱ��α�EAP�ĺ����ɱ��θ�ǿ�ң�ͼ2b����EAP����EAE����һ��ԭ���ǣ���PDMS��ȣ���Ϊ����īˮ��������Ecoflex���ʾ�����Խϵ͵�����ģ���������������谭����īˮ��ѹ�����Σ��Ӷ����Ƶ���ͨ·�غ����������˶�ѧͬ����ͼ2c��ʾ��EAE��������ͷŹ����е���Ե���仯(10�C40%Ӧ��)�����Կ�������������������ͷŶ����С������ڶ�̬Ӧ��������ͺ���ͨ·���ƻ����ؽ�֮��ľ�����EAE������̬����Ӧ������Ӧ�������Ա�������ͼ2d��ʾ��EAE���ͺ����ԣ����������ͺ����ﵽ20.1%������EAE�ĵ���Ӧ��в���80%��Ӧ�䷶Χ�ڱ��ֳ��ǵ����ԡ����֮�£�EAP���ֳ����õ�Ӧ�䴫�����ܣ����ֳ���С�Ĺ�����ߵ������ȣ������������õĿ��ظ��ԣ��ڼ�̬Ӧ�䷽����������ơ�
Ϊ�˽�һ�������ͺ������Ŷ������һ�ֻ������ѧϰ�Ķ�̬У����У��EAP�������Ӧ�䴫���źš����ǵ��������絯������������ͷ��µĵ綯��ѧ�����Ŷ������һ�ֶ�̬У�����������dz���ľ�̬У��ͨ������ģ�͵�У��������Ӧ���ͺ��Ŷ�ʹ�����ѧϰ���������������絯�����ڶ�̬Ӧ���µĵ���Ӧ���Ӷ��ܹ�����Ӧ�䴫�����Ķ�̬��ӦԤ�������Ӧ�䡣����EAPӦ�䴫�����������õ�ѧϰ��������Ե����������ŶӲ��ó����ڼ���(LSTM)���罨���䶯̬Уģ�͡���ͼ2g��ʾ��ΪӦ�䴫��������40%Ӧ���������ͷ�ѭ���IJ��������Ӧ�䴫������ԭʼ��������Ա��ֳ�С�Ĺ���ͳ��͡�ʹ�û���LSTM�����У����У�����������ĵ������ת��Ϊ������Ӧ�䣬�õ�Ӧ����ʵ��Ӧ�伸��һ�£����й���ͳ���������������ʵ��Ӧ����ʵ��Ӧ��֮��ľ��������ﵽ0.22%�����⣬Ϊ��һ����֤�˸÷�������Ч�ԣ����Ŷӻ������˷ֲ�����/�½�Ӧ�����顣��ʵ����2h���Կ�������������У�����ʩ���ڴ������ϵ�ʵ��Ӧ����ȫ����ͬ����������Ӧ����ʵ��Ӧ��֮��ľ��������Ϊ0.84%��ͨ��ʹ�û������ѧϰ��У��Ӧ�䴫�������ͺ�������ȫ����������14.4%���͵�0.1%��
(���α༭��admin)

��һƪ���п�Ժ��������AFM��������������3D��ӡ�����ӻ�ϵ�����
��һƪ����30�����̵�20��Сʱ���人���տƼ���3D��ӡ����������������
��һƪ����30�����̵�20��Сʱ���人���տƼ���3D��ӡ����������������
 ������Ժʿ�Ŷӣ�����
������Ժʿ�Ŷӣ����� Ӫ��32.29��Ԫ��3D��ӡ��
Ӫ��32.29��Ԫ��3D��ӡ�� 2025������5����У����3D
2025������5����У����3D �麣�������������3D��ӡ
�麣�������������3D��ӡ �Ӵ��浽��ɣ�һ˫�й�3D
�Ӵ��浽��ɣ�һ˫�й�3D ���ӱ���������ߣ�3D��ӡ
���ӱ���������ߣ�3D��ӡ��������
- ��������Ժʿ�Ŷӣ����������ϵ�˳��
- ��Ӫ��32.29��Ԫ��3D��ӡ��ĩ��������271
- ��2025������5����У����3D��ӡ����רҵ
- ���麣�������������3D��ӡ��
- ���Ӵ��浽��ɣ�һ˫�й�3D��ӡЬƾ����
- �����ӱ���������ߣ�3D��ӡũ����������
- ���м������������豸����Ա(3D��ӡ)ϵ��
- ��2024��Ӫ�ճ�8��Ԫ��MIM��ͳ��������
- ��һ˫��Ь����1399Ԫ�������й���˾��3D
- ��2025��һ���ȹ���3D��ӡ������96.5��̨
 ��ʹ5�꣬������
��ʹ5�꣬������ ������ά2023ȫ��
������ά2023ȫ�� �Ϻ�����ȹ�ӭ��
�Ϻ�����ȹ�ӭ�� 3D��ӡ����ֲ����
3D��ӡ����ֲ���� FRI����֬�Ͱ�ˮ
FRI����֬�Ͱ�ˮ ������ۺ��Ⱦ��
������ۺ��Ⱦ���ȵ�����
- ��������һ����������ѩФ��ˮһ���顱��
- ���㶫ʡ3D��ӡ��ֵͻ��100��Ԫ��ʡ����
- ���������ưԡ���ʲô��Ф��������ʵ
- �������ͼ�穡���һȷ��Ф����ʲô��Ф
- ����Ҷ��������ָʲô��Ф����һ�����
- �����������������룬һ����ɫ����һ����
- ������������ϲ��꣬���º�˳һ�Ÿ�����
- ������ȸ�ȷɡ���һȷ��Ф����ʲô��Ф
- ������ո����߶��䣬ʮ����Ф�Ǹ��硱��
- ����ʮ����Ф�Ǹ��磬������������塱��


