苏黎世联邦理工研究人员开发出3D打印仿生机械手,灵活度堪比人类手掌
时间:2023-08-23 10:56 来源:未知 作者:admin 阅读:次
导读:增材制造与医疗领域之间的协同效应正在显著增长。从制作3D 打印血管和植入物到制造药丸形式的药物,这些应用正在不断扩展,并引发医疗领域的变革。
2023年8月22日,苏黎世联邦理工学院的研究人员在机器人领域取得了突破性进展,推出了“FaiveHand”,这是一种通过
3D
打印生产的肌腱控制机器人手。他们与马克斯・普朗克苏黎世联邦理工学院学习系统中心合作,旨在开发一种高度模仿人类手掌特征的机械手装置。因此,Faive
Hand 与人类的手掌非常相似,使其能够为我们执行日常任务,包括家务活。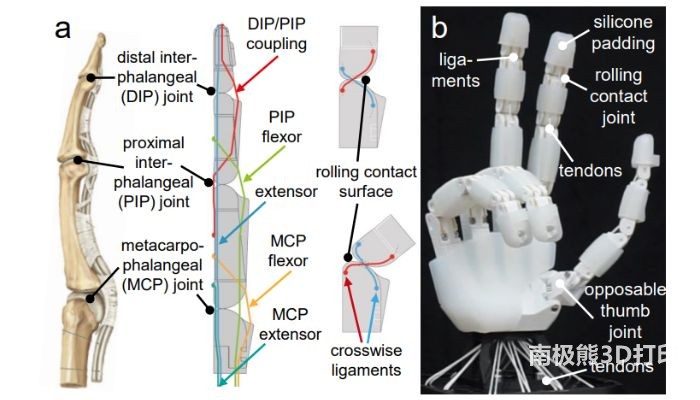
△3D 打印的Faive Hand,带有肌腱和拇指关节(照片来源:苏黎世联邦理工学院)
苏黎世联邦理工学院致力于医疗领域的创新。例如,他们的研究人员此前已经推出了使用3D 打印真菌创建的皮肤,以及具有实时监控功能的精制鞋垫。
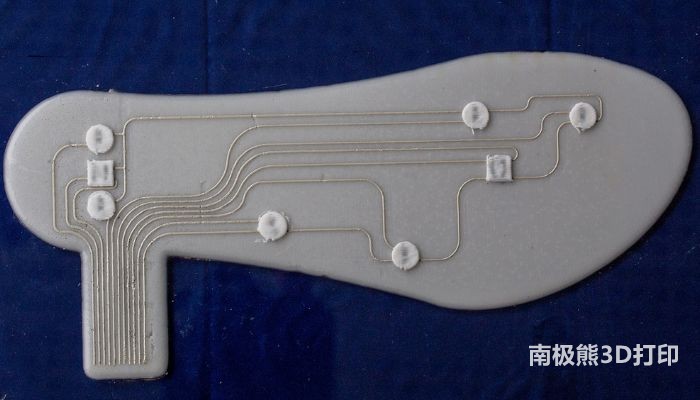
△带有由压电元件制成的导电轨道和传感器的 3D 打印鞋垫
这种类人手装置因其流畅且不受限制的运动而引人注目,使其能够精确地执行复杂而熟练的活动。与基于模型的传统控制方法相比,科学家在这种情况下选择了强化学习(RL)。强化学习特别适合复杂且逼真的机器人配置,以Faive
Hand为例,它需要细致而精致的动作和属性。Faive Hand 是在软机器人实验室内构思的,通过 3D 打印制造并由伺服电机驱动。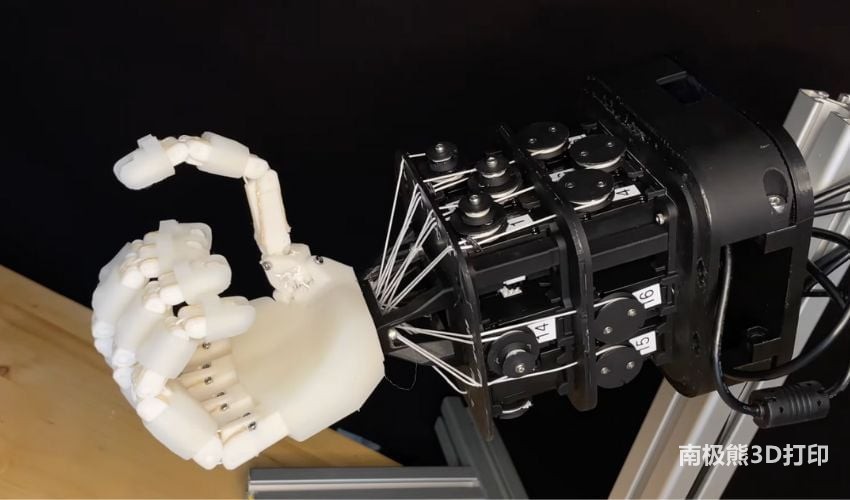

Faive Hand多功能人形机器人手的开发与传统工业夹具一样,经济高效且易于使用,其技术特点包括:
- 16个直流伺服电机
- 重量轻(0.8公斤)
- 高负载能力(10 公斤)
- 硅胶垫可实现顺应抓握
- 关节脱位
- 所有关节的位置传感
- 所有指尖均具有触觉力感应
- 基于手势的控制
-
用于安装在机器人手臂上的标准法兰(DIN . ISO 9409-1-A50)
弥合人与机器之间的差距
在这项装置创新中,研究人员通过结合滚动接触接头,引入了无固定轴旋转的可能性。然而,这可能会在管理和可操作性方面带来挑战,这主要是由于其高自由度
(DoF)
设计的复杂性。为了解决这个问题,研究人员正在开发关节角度编码器,以提高转向操作期间的精度和控制。值得注意的是,手的模拟框架及其低级控制器通过强化学习
(RL) 训练促进命令的执行,展示了 IsaacGym
模拟器中成功的技能转移和功能。目前,研究人员不断致力于增强手的功能和性能,从而为人机交互(MMI)的新前景铺平道路。
(责任编辑:admin)

 NASA与ICON联手推进太空3D
NASA与ICON联手推进太空3D 第八届医院3D打印论坛:个
第八届医院3D打印论坛:个 3D打印巨头Stratasys收购
3D打印巨头Stratasys收购 Nature子刊:3D打印技术助
Nature子刊:3D打印技术助 全球两大3D扫描仪巨头合并
全球两大3D扫描仪巨头合并 美国交通部长称,FAA正借
美国交通部长称,FAA正借最新内容
 美国空军2860万美
美国空军2860万美 美国军工企业强强
美国军工企业强强 美国斥资450万美
美国斥资450万美 GoEngineer通过收
GoEngineer通过收 3D食品打印:烹
3D食品打印:烹 卡内基梅隆研究人
卡内基梅隆研究人热点内容


