清华大学采用数字光处理(DLP)3D打印技术开发多功能磁力软体机器人
2025年4月29日,清华大学的研究人员开发了一种先进的数字光处理(DLP)3D打印技术,该技术能够一次性制造出由不同材料构成的复合磁性结构。此外,他们还利用这项技术成功设计并打印出一个集硬磁材料和超顺磁材料于一体的软体机器人。
制造二维或三维磁结构的方法多种多样。然而,传统工艺如模具辅助成型和紫外光刻受限于模具形状和材料类型,难以制造复杂磁结构。这些方法通常要求结构成分均匀,使得使用多种材料制造多功能磁结构变得复杂。尽管多步组装和材料键合技术能够将不同材料组合用于各种应用,但它们在确保制造结构的尺寸范围和精度方面存在挑战。
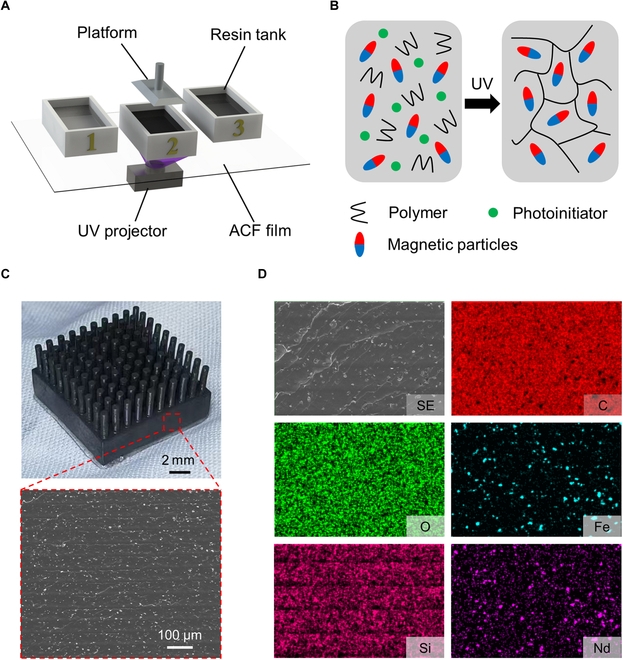
清华大学的汪家道教授提出了先进的数字光处理技术,该技术能够在单次打印过程中制造出由不同材料组成的复合磁性结构。利用这项技术,汪教授的团队成功创建了多种复合结构,包括磁性软硬材料复合体、具有不同磁浓度梯度的复合材料,以及硬磁-超顺磁复合材料。
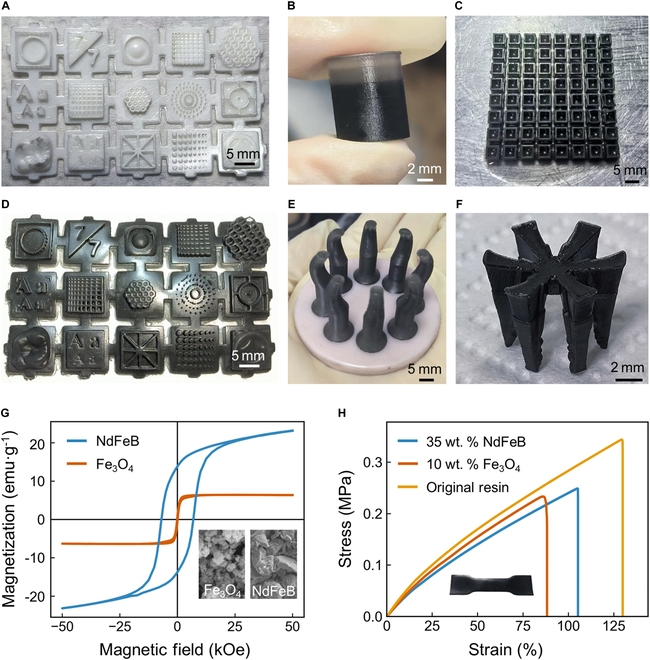
汪教授进一步解释道,这项研究介绍了磁驱动软体机器人的一次性多材料3D打印创新概念和技术原理。研究内容涵盖了打印结构的机械和磁特性,并展示了几个应用示例。研究团队还详细探讨了由硬磁和超顺磁材料构成的软体机器人的设计和验证,重点研究了磁畴分布和超顺磁材料的热效应。他们评估了机器人在表面移动、克服障碍、捕获和运输物体,甚至在液体环境中游泳的能力,并通过多物理场耦合仿真分析了它们的游泳姿势。
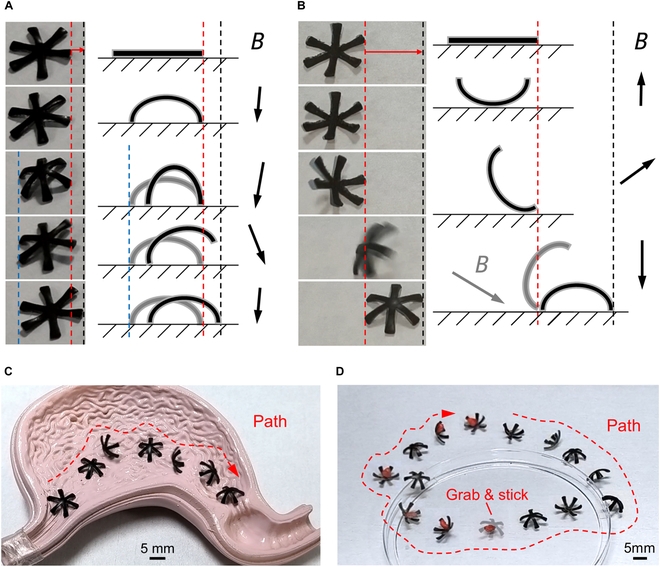
清华大学的研究人员指出,解决了强磁性结构与离型膜之间的粘附问题、固化深度减少以及磁性粒子沉降等问题,并通过生物相容性测试后,该技术最终可用于设计能够将药物直接输送到生物组织内伤口部位的胶囊机器人。
本研究得到国家自然科学基金项目(NSFC)资助,项目编号:52275200 和 52205312。
(责任编辑:admin)

 Fabric8Labs推出AI芯片定
Fabric8Labs推出AI芯片定 Titomic又一合作,将与nuF
Titomic又一合作,将与nuF 荷兰公司将开设3D打印船舶
荷兰公司将开设3D打印船舶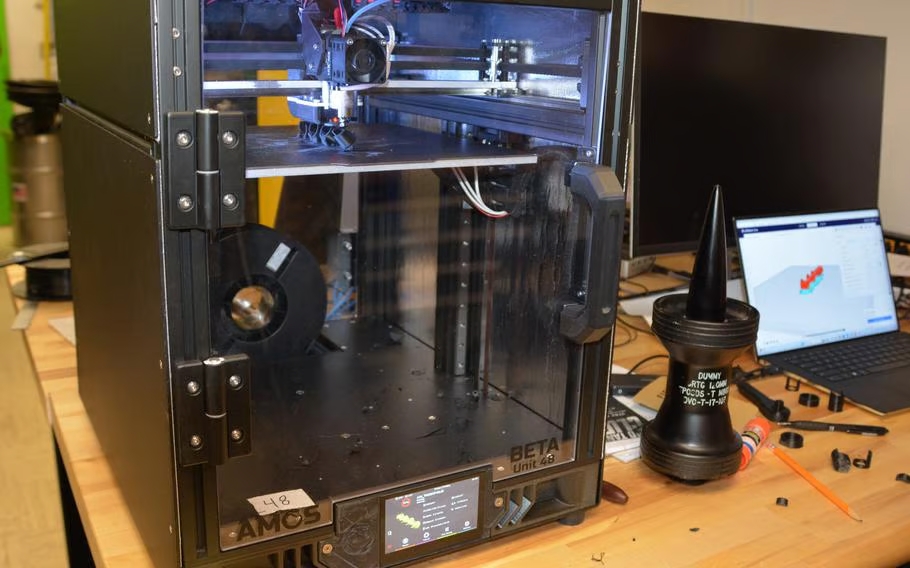 Chicago Additive推出AMOS
Chicago Additive推出AMOS 590MHz带宽+超90%辐射效率
590MHz带宽+超90%辐射效率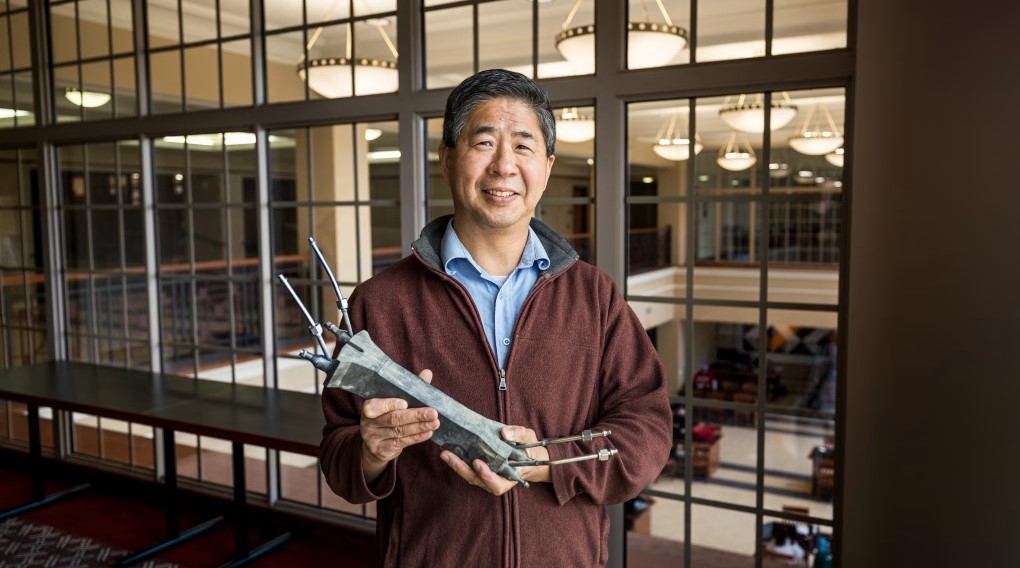 威斯康星大学麦迪逊分校工
威斯康星大学麦迪逊分校工 突破性生物3D打印
突破性生物3D打印 迪拜LEAP 71公司
迪拜LEAP 71公司 3D生物打印构建内
3D生物打印构建内 《Small Science
《Small Science 南洋理工-剑桥大
南洋理工-剑桥大 清华大学:抗拉强
清华大学:抗拉强

