使用无线光电技术远程控制的生物混合机器人
时间:2024-02-20 09:16 来源:中国机械工程学会增材制造技术 作者:冯俊男、高琳 阅读:次
供稿单位:西安交通大学机械制造系统工程国家重点实验室
来源:中国机械工程学会增材制造技术(3D打印)分会
由生命系统和人造系统融合而成的生物混合机器人本质上拥有两种系统的优势,可以模仿生物体的运动以执行特定任务。目前通常使用电刺激肌肉来控制生物混合机器人的运动,但电刺激通常需要侵入式或接触组织的电极,并且会无选择性地激活全部细胞。光遗传学为非侵入地和局部选择性地刺激生物混合机器人提供了一种强大的范式。然而该方法通常需要手动地将光源置于需要激活的肌肉附近,十分繁琐且适用性有限。为了解决该问题,伊利诺伊大学的研究者们将轻量、微型且柔性的无线光电设备与3D打印的水凝胶支架集成,并与三维骨骼肌驱动器结合,通过无线通讯实现对生物混合爬行机器人的无线控制。厘米级的爬行机器人经过计算机设计和优化,可独立刺激多个光遗传学骨骼肌,实现了个体和集体层面的爬行、转弯和运输等功能。
该研究的重点在于集成无线光电设备的柔性三维支架的设计和制造方法。首先利用激光烧蚀工艺和热风焊接工艺制造了柔性电路板并对其进行封装。随后根据计算机设计和优化结果,使用SolidWorks对三维支架建模,并使用数字光处理 3D 打印机制造了仿肌腱-骨骼结构的、非对称的聚乙二醇二丙烯酸酯水凝胶支架。随后通过将细胞/水凝胶混合溶液添加在模具中,并自发收缩使三维骨骼肌驱动器组装至水凝胶支架中。最后将柔性电路板与圆形聚二甲基硅氧烷粘贴并组装到水凝胶支架的孔洞中,以实现该无线光控的生物混合机器人的制造。通过无线光电设备远程精准控制肌肉驱动器的收缩,使得水凝胶支架发生非对称变形,最终通过支架与基底间产生的非对称摩擦力使机器人得以运动。
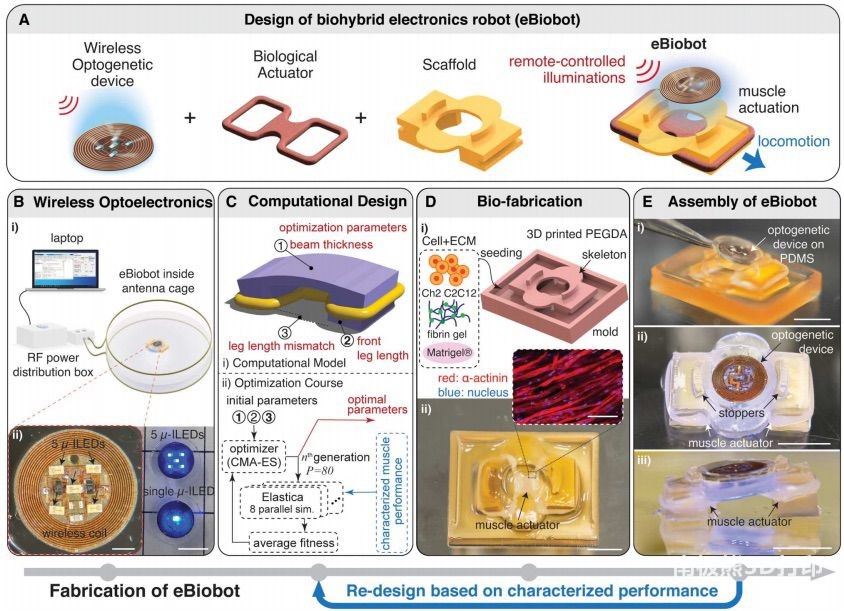
图1 该机器人的制造和优化示意图
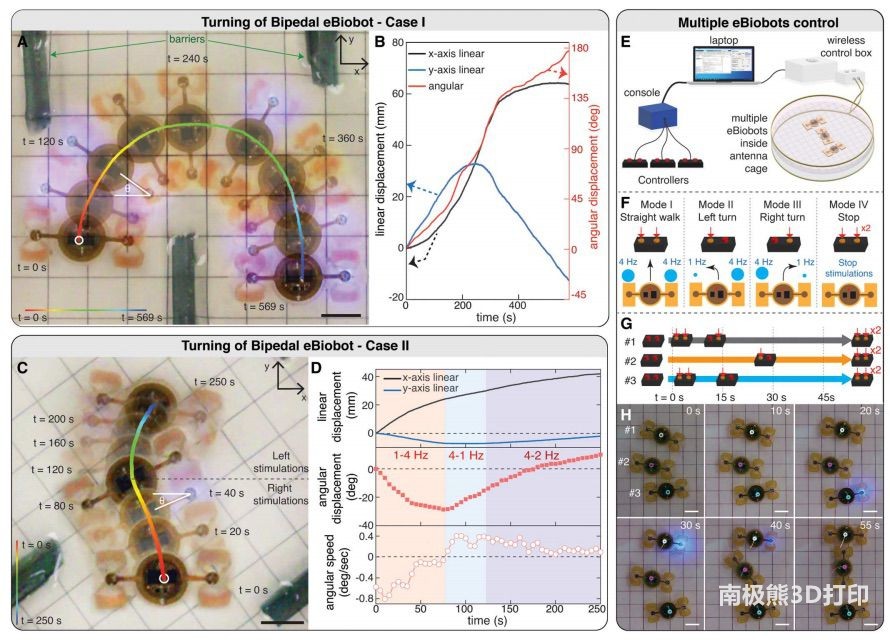
图2 双足机器人的转动和多个机器人的运动控制
参考文献:
Kim Y, Yang Y, Zhang X, et al. Remote control of muscle-driven miniature robots with battery-free wireless optoelectronics[J]. Science Robotics, 2023, 8(74): eadd1053.
(责任编辑:admin)

 设计师推出可重复使用的3D
设计师推出可重复使用的3D 3D打印水凝胶治疗糖尿病伤
3D打印水凝胶治疗糖尿病伤 IMcoMET通过微型3D打印探
IMcoMET通过微型3D打印探 俄罗斯TSU研究人员将检测
俄罗斯TSU研究人员将检测 缅因大学的新型3D打印机打
缅因大学的新型3D打印机打 布里斯托大学开发用于监测
布里斯托大学开发用于监测最新内容
 3D打印软皮垫增强
3D打印软皮垫增强 3D打印替换患病脊
3D打印替换患病脊 功能材料新“大门
功能材料新“大门 老牌运动品牌Jack
老牌运动品牌Jack Kallisio新型3D打
Kallisio新型3D打 科勒Rista 3D打印
科勒Rista 3D打印热点内容


