UCLA郑小雨教授:3D打印机器人超材料,可以感知环境、自主导航!(2)
时间:2022-06-29 10:34 来源:高分子科学前沿 作者:admin 阅读:次

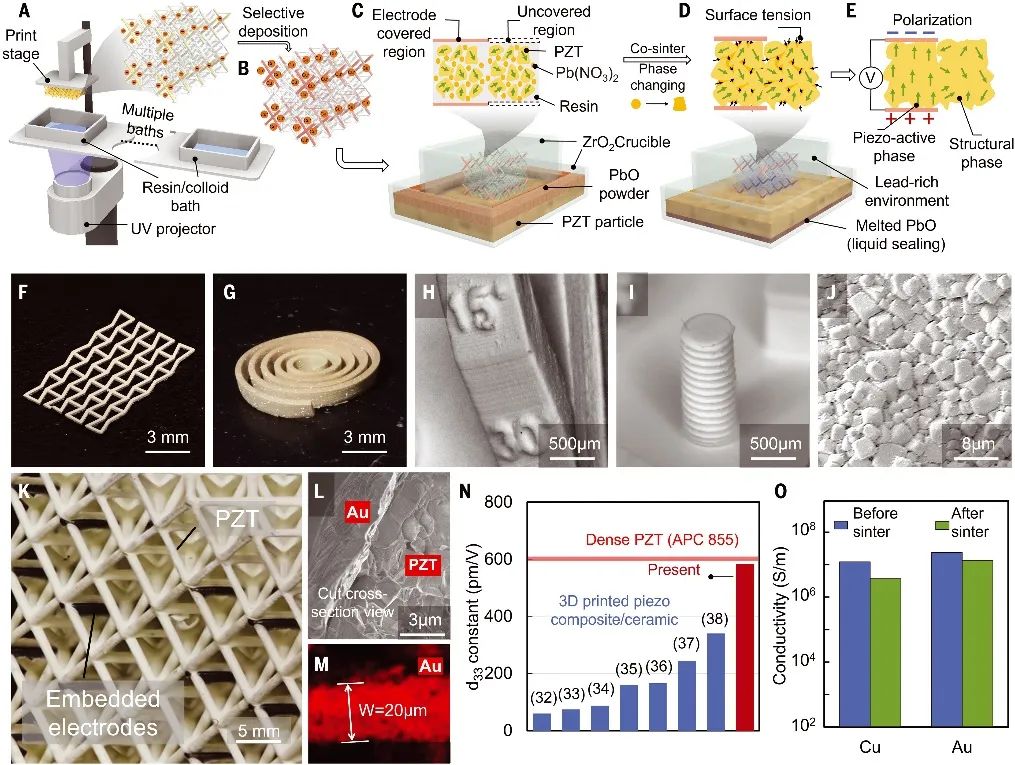
机器人超材料的增材制造
作者开发了一种电荷程序化多材料增材制造技术,能够将压电活性相、结构相和导电相组装成复杂的3D微架构。首先,通过多材料3D打印系统(材料和方法)打印带负电荷的树脂和高负载的纳米粒子胶体,如图2A所示。然后将导电相选择性地沉积在带电树脂上,形成带有电极的 3D 微架构(图 2B)。此外,氧化铅用于提供液体密封和富铅环境,以抑制 PZT 在高于 800°C 的温度下的铅蒸发(图 2D)。这种 3D 制造方法允许制造具有精确、微尺度 3D 结构和低孔隙率的压电活性材料(图 2E-2H)。总之,作者使用具有空间编程静电荷的多材料立体光刻系统,并在选定区域制造了装饰有导电金属和压电特性的3D陶瓷晶格。
△图 2. 多材料制造平台
多自由度放大和程序化应变
由增材制造的机器人超材料可以使用电场到机械应变的双向转换来产生运动和传感。逆压电效应赋予机器人驱动能力,而直接和双向压电效应分别通过本体感受(自我监测)和外感受(接触检测和遥感)实现反馈控制。超材料的拓扑结构允许将电极直接放置在压电活性支柱上,从而产生更强的电场并放大驱动应变。
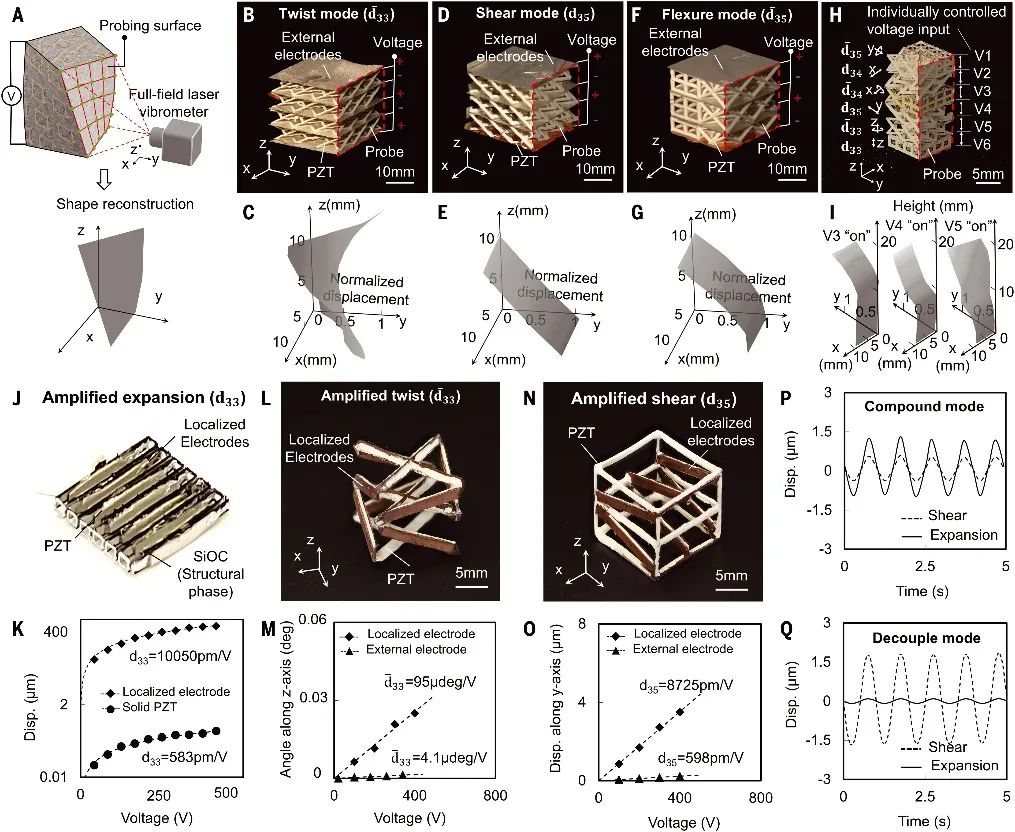
△图 3. 机器人超材料设计的实验验证
同时,作者巧妙地将驱动和感知交织在一个轻巧的微型复合3D格子中,该格子可以四处移动并感知周围环境。然后,作者通过设计板载控制系统和电源,朝着不受束缚的实施迈出了一步。这种系统级集成虽然很少见,但可以充分挖掘现实世界场景中快速发展的机器人材料的全部潜力,并找出它们的缺点。考虑到这里讨论的移动压电超材料,压电活性元件的布线仍然是增强其多功能性的限制因素,而分配功率和分散控制仍然是需要克服的障碍。尽管存在这些限制,但作者证明,当移动性和不受约束的自主性不是必需的时,一块压电架构可以用作具有六个自由度的紧凑型3D打印机械手,即能够沿所有三个轴平移并围绕所有三个轴旋转。
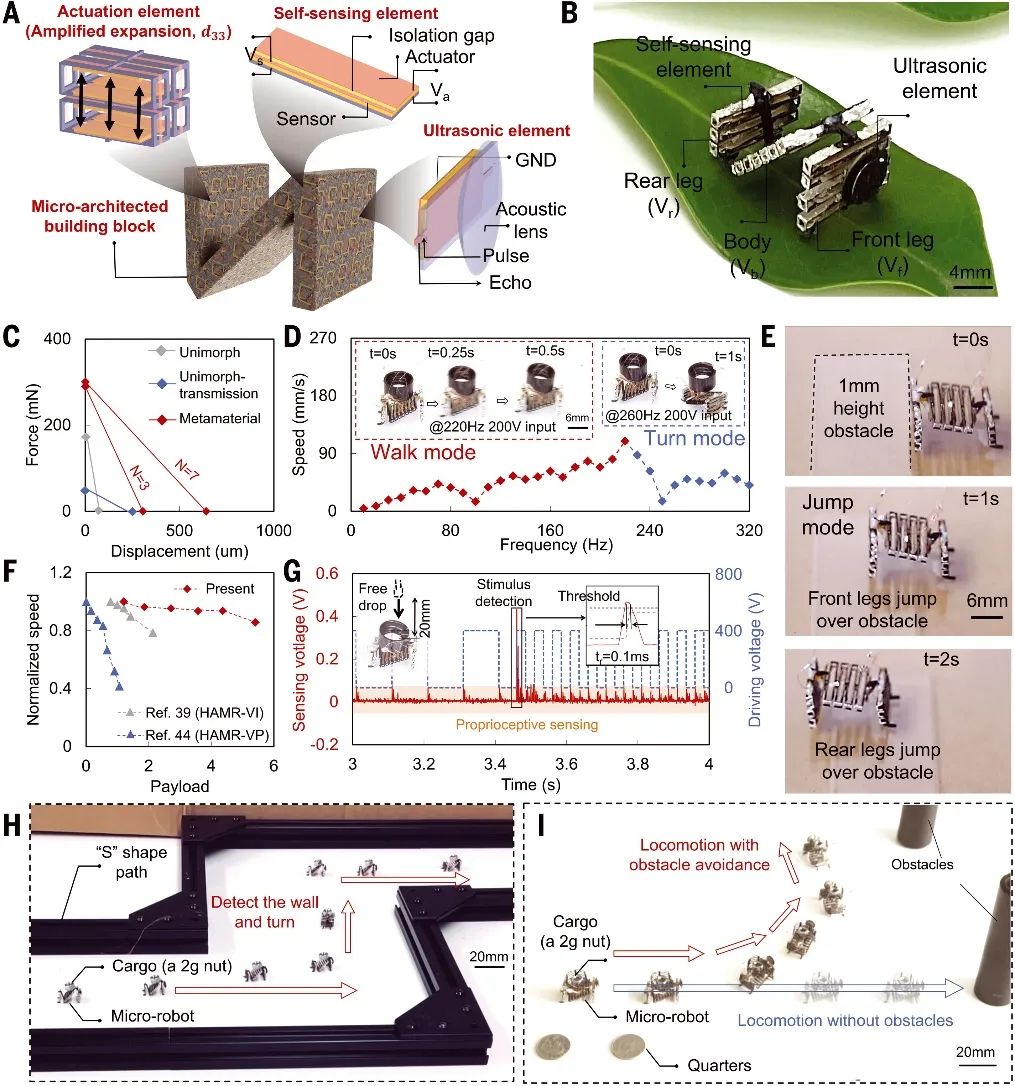
△图 4. 刺激响应多模式移动微型机器人
△自主感知、导航机器人
作者简介

原文链接:
https://doi.org/10.1126/science.abn0090
(责任编辑:admin)

 新型植物性塑料耗材,拥有
新型植物性塑料耗材,拥有 UCLA郑小雨教授:3D打印机
UCLA郑小雨教授:3D打印机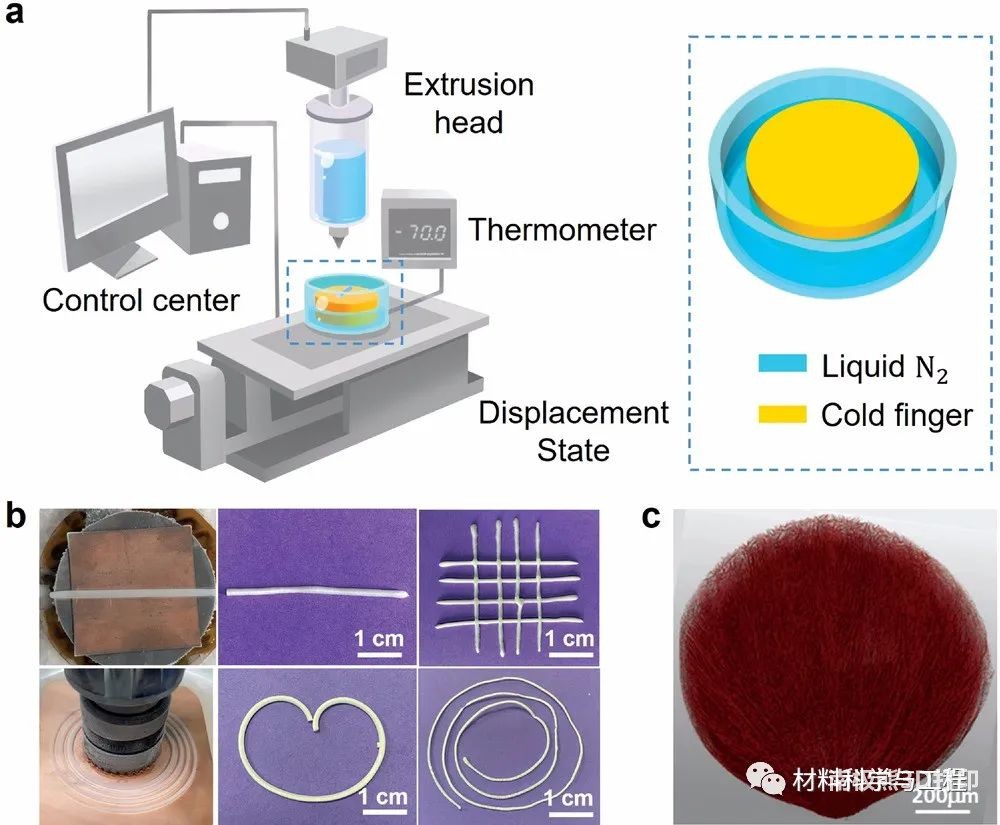 武大《Small》:冷冻3D打
武大《Small》:冷冻3D打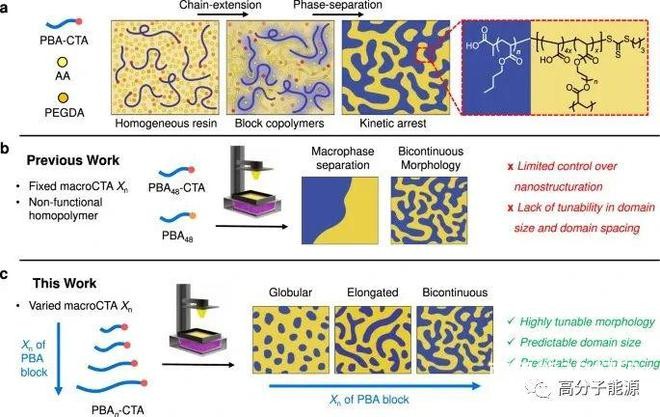 聚合诱导微相分离对3D打印
聚合诱导微相分离对3D打印 意大利研究者研发新型3D打
意大利研究者研发新型3D打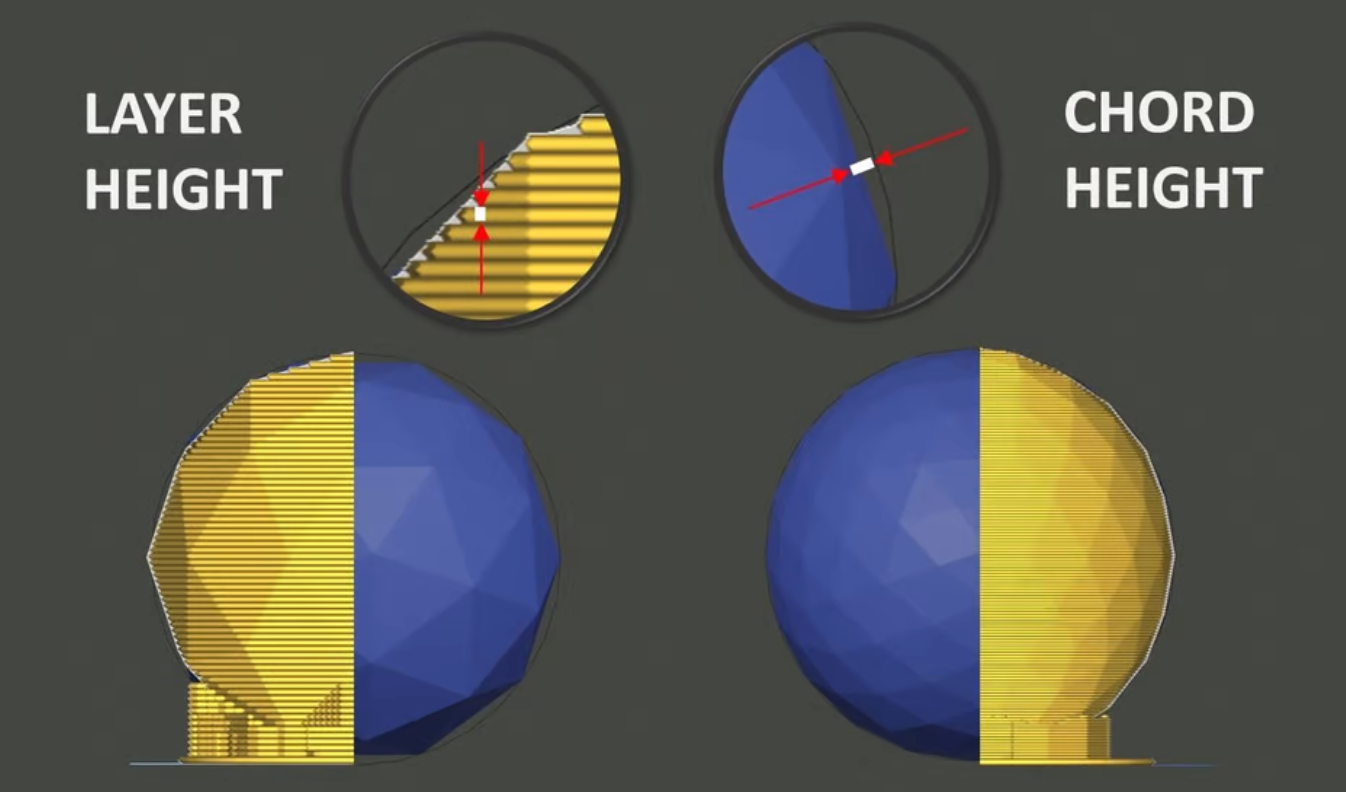 如何打磨3D打印零件获得光
如何打磨3D打印零件获得光最新内容
 Nature发表ZrO2-S
Nature发表ZrO2-S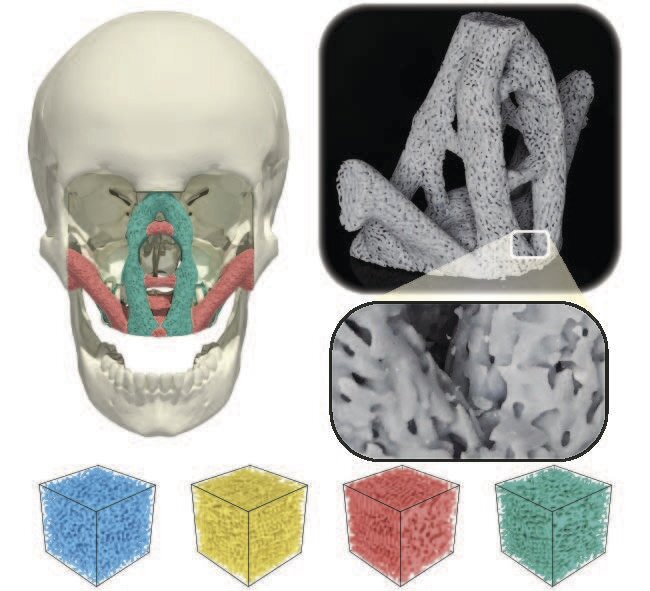 灵感源于骨骼,科
灵感源于骨骼,科 使用元素粉末和激
使用元素粉末和激 福建物构所光固化
福建物构所光固化热点内容


